
|
|
|
Главная Оптические магистрали [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [ 122 ] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] конкретному периоду передачи бита, в действительности поступит во время передачи соседних битов. Этот эффект называют взаимными помехами между символами (межсимвольной помехой). 15.1.2. Причины появления ошибок при регенерации цифровых сигналов После первоначального усиления принятый приемником сигнал поступает на решающее устройство, которое его стробирует в некоторой точке в течение каждого тактового интервала и затем сравнивает полученное значение отсчета с некоторым заданным пороговым уровнем. Если амплитуда отсчета превышает порог, генерируется 1, если нет, предполагается, что передан 0. При наличии ошибок регенерированный сигнал будет отличиться от сигнала, переданного первоначально. Определение приемлемого значения коэффициента ошибок является существенной частью технических требований на любую систему связи. В соответствии с международным стандартом на цифровые телефонные каналы связи в линии протяженностью 2500 км допускается не более 2 ошибок при передаче 10 бит информации. Обычно это выражается в виде вероятности ошибки (РЕ) во всей линии, как 2-10-. Это означает, что для каждых 10 км линии связи средняя вероятность ошибки должна поддерживаться на уровне ниже (2-IO")-(10/2500) == 0,8-10". Необходимо гюнять, что эта цифра представляет собой минимальные средние требования для каждых 10 км линии связи. На практике основная часть имеющихся ошибок относится только к очень малому числу из многих звеньев, входящих в состав протяженного канала связи. Более вероятно, что реальные характеристики системы связи будут определяться внешними возмущениями, или помехами в нашей терминологии, а не внутренними источниками шума, которые рассматриваются в гл. 14 и 15. Это часто вызывает появление «пачек» ошибок, а не их стационарное случайное распределение. Одним из достоинств волоконно-оптических систем связи является, то что в отличие от электрических сама линия передачи обычно нечувствительна к таким помехам. Однако оконечная аппаратура чувствительнее к ним, так же, как и электрические схемы электропитания, которые могут составлять часть оптического волоконного кабеля. Имея это в виду, примем в качестве обычного требования на допустимую вероятность ошибки для типичной оптической линии связи значение, равное 10"-*. В других применениях допустимые значения вероятностей ошибок могут изменяться в пределах 10~" ... 10-", однако, как будет показано, при таких уровнях ошибок требуемая мощность сигнала на входе приемника относительно нечувствительна к точному значению вероятности ошибок, которое нужно обеспечить. Вероятность ошибок можно представить в виде двух частей: Я£-(вероятность регенерации О при передаче 1) • (вероятность передачи 1) -f (вероятность регенерации 1 при передаче 0) • (вероятность передачи 0). Это можно записать в таком виде, если использовать общепринятые обозначения РЕ - Р (01) Р (1) + Р (10) Р (0), 05.1.3) что при одинаковой вероятности передачи нулей и единиц, т. е. при Р (1) - Р (0) = 1/2, дает P£ = -i-lP(0l)+P(llO)]. (15.1.4) С первого взгляда может показаться, что линейный усилитель оптического приемника должен иметь наибольшую полосу пропускания, чтобы при приеме 1 сигнал, поступающий на решающее устройство, имел вид короткого импульса в пределах тактового интервала. Тогда момент принятия решения должен синхронизироваться, чтобы обеспечить совпадение с этим импульсом. При этом должны возникать огниб-ки, обусловленные двумя причинами. 1. Шум вызывает непрерывные изменения амплитуды напряжения на входе решающего устройства. Следовательно, это напряжение может на мгновение превысить уровень порога при приеме О или упасть ниже него, когда принимается 1, как это показано на рис. 15.3. При увеличении полосы пропускания растет и уровень шума приемника. 2. Любые изменения в тактовой частоте синхронизации, которые влияют на момент поступления сигнала или на момент стробнрования в решающем устройстве могут привести к тому, что стробирование сигнала произойдет не в момент его максимального значения, а в другой. Чем уже импульс, тем серьезнее последствия, вызываемые ошибками синхронизации. Поэтому использование необоснованно широкой полосы пропускания усилителя увеличивает уровень шума и делает синхронизацию момента принятия решения более критичной. Однако если полосу пропускания усилителя уменьшить, то возникает третий источник ошибки. Пороговый уровень 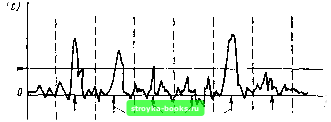 Точки пракктик решения Рис. 15.3. Сигнал на выходе части широкополосного линейного усилителя, демонстрирующий причины появления ошибок нз-за шума и неточностей еннхроиизации 3. Взаимные помехи между символами, которые, как было показано, имеют место тогда, когда сигнал, принимаемый во время одного тактового интервала, воздействует на амплитуду сигнала во время другого. Чем уже полоса пропускания усилителя, тем более вероятны взаимные помехи между символами, поскольку в этом случае импульсная характеристика усилителя расширяется и распространяется на соседние тактовые интервалы. Если ограничения полосы пропускания возникают в источнике излучения нли в оптическом волокне, то зто приводит к тому, что оптическая мощность сигнала, принимаемая за время одного тактового интервала, поступает на приемник во время соседних. Помимо обычных взаимных помех между символами это приводит также к появлению в соседних тактовых интервалах до1юлннтельного шу.ма в виде коротких импульсов. Очевидно, что оптимальное значение полосы пропускания является вопросом компромисса между этими тремя факторами. На рис. 15.1 полоса пропускания определяется характеристикой передачи фильтра Н if) и, как будет в дальнейшем показано, ее форма может играть важную роль в миин.мизации ошибок регенерации цифрового сигнала. 15.1.3. Характеристики фильтра, минимизирующего межсимвольные помехи Можно определить общий класс фильтров, обладающих таким свойством, что нх отклик на импульс, принятый во время /q, равен нулю во все моменты /о ± где п - целое число. Оказывается, этим свойством обладает идеальный фильтр низких частот, о котором упоминалось в гл. 14. Функция передачи такого фильтра при Q</-<B/2, при / > 6/2, (15.1.5) В/г а) 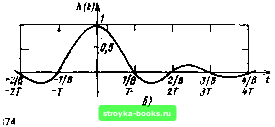 Рис. 15.4. Идеальный фильтр ннзкнх частот: а - характеристика передачи (/)== 1, приО</<В/2, О, npHf> В/2; характе- б - импульсная ристнка [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [ 122 ] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] 0.0013 |