
|
|
|
Главная Развитие народного хозяйства [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] § 1-4] Расчет времени и пути ускорения и замедления Моменты инерции,, кг- Цилиндр 8 -li-- Полый цилиндр J 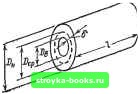 Параллелепипед 6 02-1-63 J = т-rz-= уШ - Кольцо  Момент инерции относительно смещенной. оси 02-02 Jos = Joi + maf где /о2 - момент инерции относительно смещенной оси 02-02, кг-м; /oi -момент инерции относительно оси 01-01, проходящей через центр тяжести поперечного сечения тела, кг-м; й - расстояние между осями (смещение), м примечание. Масса т - кг; плотность у - кг/м; размеры - м. 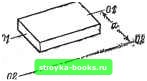 ря, м; Он и /к - диа!метр и длина коллектора. При известной массе якоря Шя, кг, и диаметре якоря Da, м (точность 12-15%), 108D>,. (1-15) 1-4. РАСЧЕТ ВРЕМЕНИ И ПУТИ УСКОРЕНИЯ Й ЗАМЕДЛЕНИЯ Время ускорения и замедления привода от частоты вращения п до частоты вращения Пу определяется при любом законе изменения динамического момента по формуле. 9,55 (1-16) Прн неизменном динамическом моменте 9.55Мд„в 9,55МвД1*„„н (1-17) Эта формула может быть применена также при относительно небольших изменениях динамического момента. В этом случае принимается его среднее значение в пределах рассматриваемого изменения скорости. При линейной зависимости динамического момента от частоты вращения двигателя (рис. 1-6) - / {Пу - Пд,) *ху - 9.55(Жд„н,а; -ЛГдин.р) дин, 9,55Ин (*дин,* - -Мдин,}/) X In *дин,а; В формулах (1-16)~(1-18) обозначено: Пх, Пу - начальная и конечная частоты вращения двигателя, об/мин; Ин - номинальная частота вращения двигателя, об/мин; Лдинл Лянн,!, - начальный и конечный динамические моменты привода, Н-м; Ми - номинальный момент двигателя, Н-м; / - момент инерции привода, приведенный к ва- 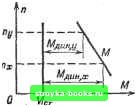 Рис. 1-6. Характеристика моментов: статического Мст, динамического Мдии и двигателя М в зависимости от частоты вращения двигателя и при прямолинейном изменении динамического момента. лу- двигателя, кг-м; txy- время ускорения или замедления, с; «н --долевые величины частот вращения и динамического момента. При нелинейной зависимости динамического момента от частоты вращения двигателя динамический момент привода Мдии = -}(п) обычно задается графически. Применяют два графоаналитических способа расчета. Первый способ: график изменения Мдкн В рассматриваемом интервале частот вращения от Пх до Пу разбивается на участки по частоте вращения с известными интервалами. Кривая динамического момента заменяется ступенчатой кривой с неизменными средними моментами в пределах каждого участка. Время изменения частоты вращения для любого участка полное время изменения частоты вращения от Пх до % где Д/t -время изменения частоты вращения для участка Дпг, с; Am - принятый интервал изменения частоты вращения для t-ro участка, об/м«н; М„ин.г-среднее значение динамического момента в пределах t-TO участка, Н-м; k - принятое число участковйзйёнення частоты вращения. Для упрощения расчетов удобно выбирать величины АПг по возможности одинаковыми Или двух значений. Больщие значения принимают для участков с менее интенсивным изменением динамического момента, а меньшие - для участков с более интенсивным его изменением. Второй способ: кривая динамического момента заменяется отдельными участками секущих прямых. Время изменения частоты вращения для каждого участка подсчитыва-ется по формуле (1-18)) для линейного изменения момента от частоты вращения. Значения частот вращения и динамических моментов берутся из графика. Полное время переходного процесса равно сумме подсчитанных времен по участкам. Этот способ позволяет иметь меньше участков, чем первый, но подсчет времени по участкам сложнее изза логарифмической зависимости. Путь двигателя при ускорении и замедлении привода. Количество оборотов двигателя при любом законе изменения его частоты вращения ndt. (1-20) где п - частота вращения двигателя, об/мин; t - время, с. Путь двигателя при изменении его частоты вращения от Пх до Пу (динамический момент постоянен) "Р 1146Мд„н (1-21) -Н «дин Если известно время изменения частоты вращения от Пх до Пу,то Ф.-С!/ = ху ~ Псу 60 ху (1-22) 4>хд = «н ху - "*ср 60 (1-23) в случае линейной зависимости динами, ческого момента от частоты вращения двигателя путь равен: 573(Мд„н.х- дин, Пу-Пх Xln- дин,ж {Пу - Пх) 573iMH (Л*дин,ж - Л1*дин,г/) *дин,х X In *дин,г/ Л«двн,а; + и*ж j X я;ДИН;Ж • (1-24) В уравнениях (1-21) - (1-24) обозначено: Фхг/- путь двигателя, об.; Пхг Пу, Иср - начальная, конечная передняя частоты вращения двигателя, об/мин; Ин- номинальная частота вращения двигателя, об/мин; дин.х. Л1дин,г/ - начальный и конечный динамические моменты, Н-м; Л!н- номинальный момент двигателя, Н-м; 1*. М*-делевые частоты вращения и момента; -момент инерции привода, приведенный к валу двигателя, кг-м. 1-5. РАСЧЕТ НАИВЫГОДНЕЙШЕГО ПЕРЕДАТОЧНОГО ЧИСЛА РЕДУКТОРА ДЛЯ ПРИВОДОВ С ПОВТОРНО-КРАТКОВРЕМЕННЫМ РЕЖИМОМ РАБОТЫ Наибольшее ускорение (замедление) электропривода имеет место при to=± Mr.. + (1-25) где to - наивыгоднейшее значение передаточного числа редуктора от двигателя к рабочему механизму; М - момент двигателя при пуске (торможении), Н-м; Мот -статический момент механизма, Н-м; /д -момент инерции двигателя и всех элементов, глухо закрепленных на его валу, кг-м; /м - момент инерции механизма, кг-м. Знак «-f» у первого слагаемого соответствует ускорению привода, а знак «-» - замедлению. У приводов с большим числом включений в час значение статического момента обычно относительно невелико и его можно во многих случаях не учитывать. Тогда наивыгоднейшее передаточное число (1-26) Отсюда следует, что кинетическая энергия механизма при наивыгоднейшем передаточном числе должна быть равна кинетической энергии двигателя. Наивыгоднейшее передаточное число при заданном перемещении (пути) механизма в случае треугольного графика скорости по времени и при одинаковых моментах двигателя при пуске и торможении. Наименьшее время заданного перемещения будет при передаточном числе Jn \ М j +10 / Mr (1-27) Если при относительно малом значении статического момента его не учитывать, наивыгоднейшее передаточное число (1-28) Наивыгоднейшее передаточное число при заданном перемещении (пути) механизма в случае трапецеидального графика скорости по времени и при отсутствии статического момента. Минимальное время перемещения механизма будет при передаточном числе V 573ф 573Ф - - где п - максимальная (установившаяся) частота вращения двигателя, об/мин; ф - заданный угол поворота (путь) вала механизма, об.; My, Мт - моменты двигателя при ускорении и замедлении, Н-м. Приведенные оптимальные передаточные числа являются лишь отправными величинами при выборе рабочего передаточного числа. Последнее выбирается после производства ряда расчетов с различными передаточными числами и сопоставления результатов с учетом максимально допустимой скорости механизма н требуемой мощности двигателя. Для снижения мощности двигателя при трапецеидальном графике скорости выгодно принимать передаточные числа несколько выше оптимальных. Уменьшение производительности механизмов при этом незначительно, а мощность двигателя существенно снижается. Б. ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ И РАСЧЕТ СОПРОТИВЛЕНИЙ 1-6. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА Общие сведения Допускаемые токи по условиям коммутации. Двигатели небольшой и, рредвей мощности допускают орйтироБояиОг.;ак- [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |