
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [ 44 ] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] хронных двигателеи, сохранив возможности глубокого и экономичного регулирования частоты вращения, присущие системам регулирования с двигателями постоянного тока. В качестве статического преобразователя частоты наибольшее распространение получили два вида преобразователей: автономный инвертор со звеном постоянного тока, который требует предварительного выпрямления тока и последующего инвертирования. Выходная частота не связана с частотой сети и может изменяться от малых значений до нескольких тысяч герц; преобразователи с непосредственной связью формируют кривую выходного напряжения из напряжения более высокой частоты в напряжение низкой частоты. При естественной коммутации тока возможный верхний предел изменения выходной частоты нри шестифазной реверсивной схеме в каждой фазе двигателя не превышает одной трети частоты питания. Непосредственные преобразователи иногда называют цик-.поконверторами. Законы регулирования электропривода с частотным управлением. Как известно, напряжение фазы статора асинхронного двигателя и«£ = 4,44ш/Соб/Ф. (1-184) где £ -э.д.с. фазы статора, вызванная главным потоком двигателя; w - число витков фазы статора; /iCoc - обмоточный коэффициент статора; f - частота питания; Ф - главный поток двигателя. Из (1-184) следует, что если оставить напряжение неизменным, то прн изменении частоты магнитный ноток будет изменяться обратно пропорционально частоте напряжения питания. Таким образом, нри снижении частоты ниже номинальной поток возрастает, что приводит к насыщению магнитонровода н к резкому возрастанию намагничивающего тока. Возрастание частоты при неизменном напряжении приводят к недоиспользованию двигателя. Правила регулирования асинхронных двигателей нри изменении частоты питающего тока приведены в табл. 1-33. 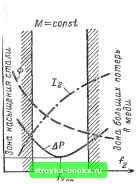 Рис. 1-162. Зависимость потерь, магнитного потока и тока ротора от частоты ротора. М. П. Костенко сформулировал закон частотного управления: «Если сконструировать асинхронный двигатель для частоты fi,, момента Л1н и напряжения на зажимах Un и изменить затем нри частоте f и моменте М напряжение U таким образом, чтобы всегда было удовлетворено соотношение (1-185) то двигатель будет работать практически нри неизменном коэффициенте устойчивости, неизменном cos фн и постоянном абсолютном скольжении и к. п. д., зависящем только отизменения частоты и не зависящем от изменения момента на валу, если Таблица 1-33 Правила частотного регулирования Парамегры ф ф.. Постоянная мощность М = Мн -/s const Постоянный момент М = М = const const const const Вентиляционный закон V /н/ J 1 насыщение магаитной системы не слишком велико». Если учитывать активное сопротивление обмоток статора, то для того, чтобы поток изменялся по правилам, перечисленным в табл. 1-33, необходимо при малых частотах увеличивать значение IJlUn по сравнению со значениями, приведенными в табл. 1-33. Возможны, естественно, и другие законы регулирования, например по максимальному к. п. д. Поскольку минимальные потери в асинхронном двигателе возникают при определенном оптимальном значении частоты тока ротора /г (рис. 1-162), то с изменением частоты так изменяют напряжение статора, чтобы обеспечить работу двигателя при оптимальной частоте ротора. Возникает необходимость независимого от изменения частоты регулирования напряжения в широких пределах. Электромагнитный момент асинхронного двигателя может быть выражен следующим образом: AJ = Cf/Фсозфг, (1-186) где С] - постоянный коэффициент; /г - ток ротора; ф2 -угол сдвига фаз между э.д.с. и током ротора hchl (1-187) так как ток ротора, частота ротора и главный поток двигателя связаны уравнением (1-187) в процессе управления системой «преобразователь частоты -- асинхронный двигатель», нужно контролировать любые две величины, например ток ротора и частоту ротора, главный поток и частоту ротора, ток ротора и главный поток. Непосредственное измерение тока ротора ненозможно. Измерение вместо тока ротора тока статора вносит некоторую погрешность. Частота ротора fa получается путем вычитания из частоты питания частоты вращения ротора, которая получается от частотного датчика, сочлененного с валом двигателя. Поток двигателя получается непосредственно с помощью датчика Холла. Под воздействием системы автоматического регулирования частота и напряжение преобразователя частоты в статических режимах регулируются так, чтобы обеспечивался заданный закон изменения двух из трех связанных уравнением (1-187) величин. Автономные инверторы со звеном постоянного тока. К автономным инверторам предъявляют следующие требования: коммутация должна быть устойчивой при любой частоте и любой нагрузке на валу, поэтому следует выбирать такие схе--мы автономных инверторов, в которых частота, значение и характер нагрузки мало влияют на коммутационную способность; отклонение формы выходного напряжения преобразователя от синусоидальной Яй"Л50быть минимайвным, так как нали-Чие-Ёь}еМй"Йрй%ккк приводит -к ШвйИхёИ- ным потерям в двигателе и к неравномерному ходу двигателя на нижнем пределе частоты. Когда двигатель работает в очень узком диапазоне изменения частоты или применяется автономный инвертор с шнротно-импульсным регулированием выходного напряжения, можно выпрямитель выпол- и VZ Ш 114! 11 ксг Рис. 1-163. Схема инвертора тока с полной коммутирующей емкостью. пять на нерегулируемых вентилях. В других случаях выпрямитель выполняют регулируемым на тиристорах с различными схемами фазового или широтно-импульсного управления напряжением. В настоящее время для инверторов со звеном постоянного тока принята следующая основная классификация: автономные инверторы тока, у которых на входе в качестве фильтра включена индуктивность, причем коммутация тиристоров осуществляется таким- образом, что имеет место однонаправленное прохождение тока; автономные инверторы напряжения, у которых на входе в качестве фильтра включен конденсатор, причем кроме тиристоров в качестве ключевых элементов применяют встречно включенные относительно тиристоров диоды и коммутация осуществляется таким образом, что происходит двухполярное прохождение тока. Автономный инвертор тока с полной коммутирующей емкостью. На рис. 1-163 изображена схема трехфазного инвертора тока с полной коммутирующей емкостью." Трехфазный тирнсторный выпрямитель U выпрямляет ток сети, и выпрямленный ток сглаживается дросселем L. Тиристоры инвертора тока UZ \C\~VC6, включенные по трехфазной мостовой схеме, пропускают ток в течение 1/3 периода (120°). Переключение производится с периодичностью 60° в последовательности, соответствующей нумерации тиристоров. Коммутация тока и компенсация реактивной мощности осуществляются конденсаторами С1~СЗ на стороне переменного тока. К достоинствам схемы следует отнести сравнительную простоту и благоприятную для тиристоров форму коммутационного Напряжения. Наряду с достоинствами имеются и недостатки: вольт-ампенайЗаакте- ристика является крутопадающей, причем на холостом ходу напряжение может пре-выщать напряжение источника постоянного тока в десятки раз; емкость конденсаторов должна быть большой, при снижении частоты и при постоянном моменте на валу она возрастает обратно пропорционально квадрату частоты; большая емкость, выбранная из условия низшей частоты, может повлечь за собой на более высоких частотах конденсаторное самовозбуждение асинхронного двигателя, вызывающее самораскачивание системы «инвертор-двигатель», которое приводит к срыву коммутации и короткому замыканию источника питания. Инверторы тока с полной коммутирующей емкостью применяют в основном в-качестве источников повышенной частоты, при стабильной выходной частоте или при малых пределах изменения последней. При изменении нагрузки в широких пределах применяют регуляторы отбора реактивной мощности, представляющие собой три линейные индуктивности, последовательно с каждой из которых включаются встречно-параллельные тиристоры. Включение регулятора отбора реактивной мощности параллельно коммутирующим конденсаторам дает возможность стабилизировать выходное напряжение инвертора тока. Автономный инвертор тока с ограниченными коммутирующими емкостями. На рис. 1-164 изображена схема трехфазного инвертора тока с ограниченными коммутирующими емкостями. По сравнению со схемой рис. 1-163 коммутирующие емкости разбиты на две группы С1, СЗ, С5 и С2, С4, Сб. Кроме того, коммутирующие емкости отделены от двигателя отсекающими диодами VD1, VD3, VD5 и VD2, VD4, VD6, в результате чего можно применять одни и те же ограниченные но значению емкости на всем диапазоне регулирования частоты инвертора. Преимущества инвертора тока следующие: а схема инвертора тока с ограниченными емкостями сравнительно проста, так как отсутствуют конденсаторы в I VC1 Ш VCS
VCl/- VCB сг усг t f f- Члл Рис.-1-164. Схема инвертора тока с огран-и: ., .даной коммутирующей емкостью. . звене постоянного тока и диоды реактивного тока; б) форма кривой напряжения на выходе инвертора приближается к синусоидальной; в) инвертор допускает осуществление рекуперативного торможения двигателя М с переводом инвертора VZ в режим выпрямителя, а преобразователя т ъ режим инвертора, ведомого сетью. При л л д j.: VC3 vcs 5 5 5 \[-cs by US \l Ч. V. 5 5 5 HHH Рис. 1-165. Схема инвертора напряжения с ограниченными коммутирующими емкостями. этом ток промежуточной цепи постоянного тока не изменяется но направлению, а изменяется полярность напряжения звена постоянного тока. Подобный переход в режим рекуперативного торможения не требует никаких дополнительных аппаратов в силовой части преобразователя; г) защита инвертора тока упрощается, так как отсутствуют конденсаторы большой емкости в звене постоянного тока. Наряду с достоинствами инвертору тока присущи следующие недостатки: а) инвертор не является устойчивым на холостом ходу, поэтому он всегда должен быть замкнут на определенную нагрузку; б) инвертор пригоден для питания только одно-двигательного привода; в) форма тока имеет прямоугольную форму с шириной импульса 120°, что при малых частотах приводит к переменному крутящему моменту, т. е. к шаговому эффекту. Инвертор тока пригоден для индивидуальных электроприводов с мощностью двигателей 10- 500 кВт, с пределами регулирования частоты вращения 20: 1. Автономный инвертор напряжения с отсекающими диодами и диодами реактивного тока. Если от преобразователя частоты необходимо питать многодвигательный электропривод, то преобразователь частоты должен быть построен по схеме инвертора напряжения с отсекающими диодами и диодами реактивного тока. Преобразователь и работает в режиме управляемого выпрямителя. Выпрямленное ,,.напряж,ерие .фдАдарутдя ,.с помощью,,дро<?йда,,1Л(,р [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [ 44 ] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0014 |