
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [ 47 ] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] serif U1 ?Т? иг soru из ??? и- 50Гц 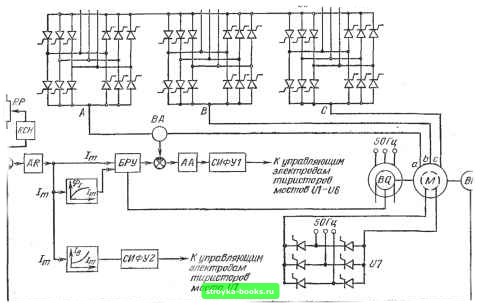 Рис. 1-172. Схема вентильного двигателя с непосредственным преобразователем частоты. тора ВА. Выход АА подается на систему импульсно-фазового управления СИФУ1 преобразователей [Ли U2. Подобным же образом управляются преобразователи U3, U4, US и U6. В остальном структура схемы на рис. 1-172 соответствует структуре схемы на рис 1-171, т. е. имеет место система подчиненного регулирования, где контур тока статора и его угловое положение, а также ток возбуждения двигателя подчиняются выходному сигналу 1т регулятора частоты вращения AR. Потенциометр RP является задатчиком устанавливаемой частоты вращения, его выходное напряжение через регулятор интенсивности RCH подводится к узлу сравнения регулятора частоты вращения AR. Действите.пьное значение частоты вращения подводится к узлу сравнения AR от тахогенератора BR. Привод может работать в четырех квадрантах, осуществляя двигательный режим п режим рекуперативного торможения в обоих направлениях. Преимущества системы- естественная коммутация и полное устранение вопроса о необходимости работы вентильного двигателя при низких частотах вращения в режиме принудительной коммутации. При достаточной мощности преобразователя можно достигнуть большого момента при нестационарных процессах, значительно превышающего момент в тиристор-, э.деет,ропр.ицрД%Х ..постоянного . тока Для изменения направления вращения достаточно изменить порядок следования фаз в блоке счетно-решающего устройства ВРУ. 1-38. ВЕНТИЛЬНЫЕ КАСКАДЫ Вентильный каскад представляет собой привод с регулированием частоты вращения асинхронного двигателя с фазным ротором, у которого энергия скольжения через кольца ротора, выпрямитель и сглаживающий дроссель возвращается обратно в сеть с помощью инвертора, ведомого сетью. Обычно вентильный каскад применяется в элеЕтроприводах, у которых пределы регулирования частоты вращения не превышают 1,5-2, Скелетная схема вентильного каскада изображена на рйс. 1-173. Статор асинхронного двигателя с фазным ротором получает питание от сети 50 Гц через силовой выключатель Q1. В цепь ротора двигателя включены пусковые сопротивления R1-R6, которые во время разгона включаются контактами контактора КМЗ и по мере разгона двигателя шунтируются Контактами контакторов КМ2 и КМ1; управление контакторами осуществляется станцией управления СУ. После разгона двигателя до частоты вращения, при которой возможна работа вентильного каскада, двигатель переключается на работу в каскаде с помощью контактов контактора -КМ4,; контакты контакторов КШ И < 50Ги 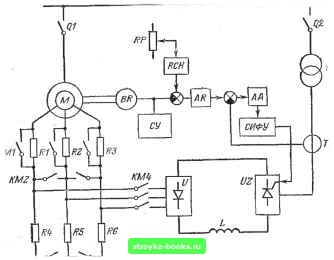 Рнс. 1-173. Схема, вентильного каскада. КМЗ при этом размыкаются. Ток ротора выпрямляется диодным мостом U и после сглаливания дросселем L подводится к инвертору UZ, который связан с сетью через трансформатор Т и силовой выключатель Q2. Структура системы автоматического регулирования относится к системам с подчиненным регулированием. Сигнал от задающего потенциометра RP через задатчик интенсивности RCH и сигнал действительного значения частоты вращения от тахогенератора BR подводится на узел сравнения регулятора частоты вращения AR. Регулятору частоты вращения подчинен регулятор тока АА; действительное значение тока инвертора выдает трансформатор тока ТА. Выход регулятора тока воздействует на систему импульсно-фазового управления (СИФУ), управляющую током инвертора UZ. Вентильные каскады часто применяют для регулирования электроприводов с вентиляторной нагрузкой (вентиля-торы, турбокомпрессоры, центробежные насосы). Выпрямитель и инвертор должны быть рассчитаны на максимальный ток ротора, который возникает при частотах вращения, близких к полной частоте вращения, и в то же время должны быть рассчитаны на максимальное напряжение ротора при малых частотах вращения. При щироком диапазоне частот вращения это вызывает увеличение мощности, на которую должны быть рассчитаны выпрямитель и инвертор, кроме того, при малых частотах вращения и вентиляторной нагрузке ток ротора становится настолько малым, что это вызывает ненадежную работу контактных колец и щеток ротора. Некоторые фирмы применяют в этом слу- чае дополнительную подпитку контакта щетки - Кольцо от обмоток низкого напряжения трансформаторов. Для устранения Этих недостатков институтом ВНИИ-Электропривод разработана усовершенствованная схема вентильного каскада с применением силового автотрансформатора в цепи статора, изображенная на рис. 1-174. Асинхронный двигатель с фазным ротором М получает питание от сети 6 кВ через выключатель Q1 и силовой автотрансформатор TI, который может переключаться под нагрузкой. В цепь ротора двигателя М включен диодный выпрямитель по мостовой схеме U1. Выпрямленный ток ротора сглаживается дросселем L и подается на входы двух инверторов, ведомых сетью UZ1 и UZ2, которые через трансформаторы Т2 и ТЗ и выключатель Q2 рекуперируют энергию скольжения двигателя в Сеть. Система автоматического регулирования относится к системам подчиненного регулирования. Задающее напряжение через задатчик интенсивности RCH подается на узел сравнения регулятора частоты вращения AR, к которому, кроме того, подводится напряжение от тахогенератора переменного тока BR через выпрямитель U2 и фильтр Z1. Выходной сигнал регулятора AR подается иа узел сравнения регулятора тока АА. Действительное значение тока снимается с шунта ВА включенного в цепь выпрямленного тока ротора. Выход регулятора тока АА подводится к системам импульсно-фазового управления СИФУ! и СИФУ2 инверторов UZi и UZ2. Трансформаторы Т2 и ТЗ выбраны таким образом, что напряжение, подводимое к инвертору f/Z/, сдвинуто по фазе по отношению soru, 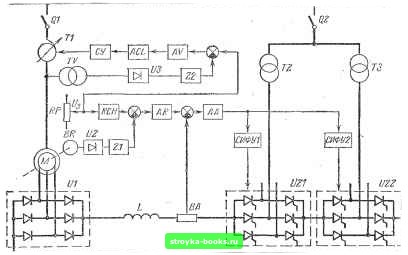 Рис. 1-174. Схема вентильного каскада с расширенными пределами регулирования частоты вращения. к напряжению, подводимому к инвертору fZ2, на угол 30°. В этом случае возникает двенадцатифазная система инвертирования, которая улучшает форму тока, рекуперированного в сеть, и уменьшает искажение напряжения питающей сети. Кроме регулирования тока с помощью фазового управления инверторами VZ1 и VZ2 имеется вторая система автоматического регулирования напряжения, подводимого к статору двигателя М. Задающее напряжение от потенциометра RP подводится к узлу сравнения регулятора напряжения AV. К этому узлу сравнения подводится напряжение от трансформатора напряжения TV через выпрямитель U3 и фильтр Z2. Выход регулятора напряжения AV подводится через функциональный элемент ACL, создающий зону нечувствительности, к станции управления СУ, переклю- чающей под нагрузкой выходное напряжение автотрансформатора Т1. Применение автотрансформатора Ti создает некоторые преимущества, которые заключаются в повышении тока ротора в приводах с вентиляторной нагрузкой при малых частотах вращения, что дает возможность расширить пределы регулирования частоты вращения до 1 : 10 при ограниченной мощности выпрямителей и инверторов в цепи ротора. Кроме того, снижается потребление реактивной мощности из сети. Появляется возможность производить запуск двигателя М без пусковых сопротивлений. К недостаткам вентильного каскада следует отнести отсутствие рекуперативного торможения для быстрого останова электропривода вместе с компрессором. При необходимости торможения возможно использовать динамическое торможение с питани- Таблица Соотношения между мош,ностыо, передаваемой через воздзшный зазор, механической мош,настью и мош,ностью скольжения 1-34
В таблице: Р g „-мощность, передаваемая через воздушный зазор, прн номинальной мощности на валу; s-.скольжение; фавное UiU (/2 - частота ротора; fi - частота статора).. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [ 47 ] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0015 |
||||||||||||||||||||||||||