
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] тельной обмотки возбуждения номинальным током расчет сопротивлений Гшо и гт производится по формулам (1-44) и (1-45). как и для двигателей последовательного возбуждения. При торможении с потоком от одной параллельной обмотки возбуждения с частоты вращения Инач якорь замыкается на сопротивление Лт, равное: , „ -Чп- (1-46) доп "о Частоты вращения Инач и идеального холостого хода По берутся из универсальной естественной характеристики соответственно при минимально возможном статическом моменте (токе) и при токе якоря, равном нулю. 1-7. АСИНХРОННЫЕ ДВИГАТЕЛИ Общие сведения Номинальное сопротивление ротора - активное сопротивление каждой линии ротора, состоящее из внутреннего и внешнего, которое при неподвижном роторе и номинальной частоте и напряжении в сети определяет номинальный ток в роторе /р.и." i?p,H = .-i . (1-47) где Ер.и-э.д.с. между кольцами неподвижного разомкнутого ротора. Любое сопротивление г в долях номинального Асинхронные двигатели с контактными кольцами Естественные и искусственные характеристики. Упрощенная формула механической характеристики (пренебрегая активным сопротивлением статора) м=м„- S iK. (1-48) в которой s„ = Xc + Xr> где М, Мк - моменты двигателя (текущий и критический соответственно); s, s„-скольжения ротора (текущее и критическое); лго - внутреннее реактивное сопротивление линии статора; Гр, х - внутренние активное и реактивное сопротивления линии ротора, приведенные к статору. 2-825 Когда неизвестны внутренние сопротивления двигателей, механическую характеристику асинхронного двигателя в рабочей части заменяют прямой, проходящей через точки синхронной и номинальной частот вращения (при номинальном моменте). Искусственные характеристики рассчитываются так же, как естественные, но вместо внутреннего активного сопротивления линии ротора Гр вводится полное сопротивление Rp, включающее внешнее Гв, т. е. i?p=rp-f ге. Приведенное на рис. 1-9 семейство характеристик рассчитано по точной формуле (с учетом сопротивления статора). Достаточно рассчитать только одну характеристику (естественную или искусственную), остальные получаются из простой пропорции (1-49) где 5с, Sk - скольжения на естественной и искусственной характеристшсах при одном и том же моменте. Токи ротора (1-50) Пуск. Пусковые сопротивления удобно определять путем подбора характеристик из семейства на рис. 1-9. Для упрощенных расчетов строится прямолинейная характеристика по двум точкам: М*=0, 5=0 и М*=1, s=s„=r»p. Далее строятся пусковые характеристики по величинам Ml к Мг и на вертикали при М«=1 находятся графически сопротивления ступеней гз, r„z, r»i. Аналитически сопротивления определяются так же, как и для двигателей постоянного тока параллельного возбуждения, но в формуле (1-35)вместо г.д должно быть s„, а в (1-36) вместо Гд должно быть Гр. Противовключение. Сопротивление ступени противовключения можно определять подбором характеристик из семейства иа рис. 1-9 по УСЛОВИЯМ получения нулных скоростей спуска груза в тормозном режиме или ограничения момента и тока переключения двигателя на обратный ход при полной скорости. Можно также найти требуемое сопротивление линии ротора, используя формулу (1-49). Динамическое торможение. На рис. 1-10 и 1-11 даны универсальные механические характеристики динамического торможения и тока ротора асинхронных двигателей с фазным ротором. Как видно из рис. 1-10, для быстрой остановки привода требуется подавать постоянный ток возбуждения 1, равный 200-300% тока холостого хода статора /о,х. Характеристик*! ,. нри садр,ативленияХ!1/?.р, равных 0,2 или 0,4, являются наиболее 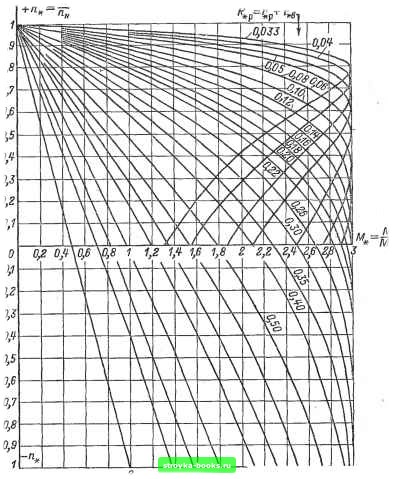 0,8 0,7 0,6 0,5 О.Ч- Рис. 1-9. Универсальные механические характеристики асинхронных двигателей с фазным ротором краново-металлургического типа с критическим моментом, равным трехкратному номинального. удовлетворительными, причем характеристика с i?«p=0,4 даст меньший путь привода при торможении, чем характеристика с /?»р=0,2, потому что при больших частотах вращения, при которых получается больший выбег по пути, она имеет более высокий тормозной момент. Асинхронные двигатели с короткозамкнутым ротором Механические характеристики и характеристики тока статора берутся по каталожным данным. Для приводов длительного релшма применяются двигатели с малым номинальным скольжением и относительно малым пусковым моментом. Для приводов длительного режима с пиковыми моментами более подходящими являются двигатели с повышенным пусковым моментом н малым номинальным скольжением. Для длительного режима работы с ударными нагрузками (молоты, прессы, ножницы) наиболее приемлемыми являются двигатели с повышенным скольжением; Для приводов повторно-кратковременного режима работы с частыми пусками (прокатные станы, краны) применяются двигатели краново-металлургического типа, имеющие наиболее высокий пусковой момент и малый пусковой ток. Повышенное скольжение этих двигателей не является недостатком для указанного режима работы. Обычно пуск двигателей производится непосредственным включением на сеть. Динамическое торможение. Механические характеристики при динамическом торможении характерны малыми начальными тормозными моментами. На рис. 1-12 даны Постоянный, ток 1в еоз6у>ндени.я Трехфазный, ток кол. хода, тг- 0,9 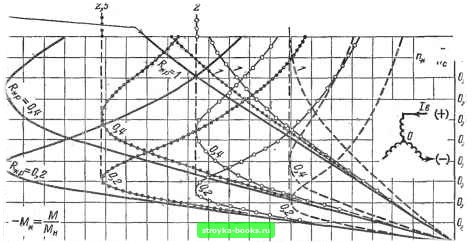 г,г 2,1 2 1,9 1,8 %7 1/ 1,5 %Ч 1,S 1,г %1 1 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 О Рис. 1-10. Универсальные механические характеристики динамического торможения асинхронных двигателей с фазным ротором краново-металлургического типа (цифры 0,2; 0,4 и 1 при кривых обозначают полное сопротивление линии ротора в долях номинального i?p.n). -г. Jg Постоянный ток Возбуждения I Icjc трехфазный ток хол. хода. I 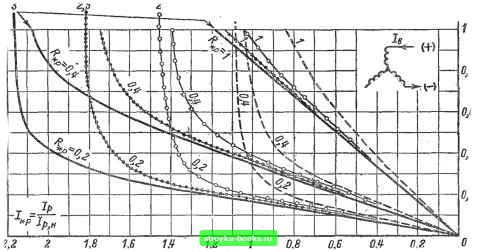 Рис. 1-11. Универсальные характеристики тока ротора при динамическом торможении асинхронных двигателей с короткозамкнутым ротором краново-металлургического типа. кривые для краново-металлургического двигателя, из которых видно, что увеличение тока возбуждения статора до допустимых пределов дает увеличение начального тормозного момента лишь до половины номинального. Двигатель значительную часть времени при торможении вращается с большой частотой, что приводит к большому выбегу по пути. Торможение более эффектив- но с 50 7о синхронной частоты вращения. Для получения удовлетворительного торможения асинхронных двигателей с коротко-замкнутым ротором нужно давать относительно большие токи возбуждения (до 3- 5-кратных трехфазного тока холостого хода). Двигатели с повышенным сопротивлением обмотки ротора дают более благоприятные результаты. [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0015 |