
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 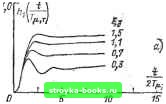 0,Z- 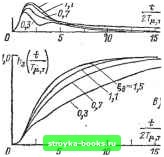 Рис. 1-204. Переходные характеристики, иллюстрирующие влияние э. д. с. двигателя для ши,д=1/7р„.  О S 10 Рис. 1 206. Переходные характеристики, иллюстрирующие влияние э. д. с. двигателя , для Шп.н=1/8Г .  =1,1 --0,7   Рис. 1-205. Переходные характеристики, иллюстрирующие влияние э. д. с двигате.11я для (Оп.я=1/47ц,1- Рис. 1-207. Переходные характеристики, иллюстрирующие влияние э. д. с. двигателя для Шп,н=1/127 . Ri Тэт Се Ф 1 Rb fee Rs при Uex ~ const; / t \ IJ..T/ при t/Bx=const- •Rsfec Параметрами семейства процессов 1 являются Vt.. переходных величины Шп, д= -.характерн- эм э зующне динамику привода без системы регулирования, где Мп, д - угловая частота недемпфированных колебаний якорной цепи двигателя; - коэффициент демпфирования якорной цепи двигателя. При анализе динамических свойств токового контура представляет интерес рассмотрение влияния постоянной интегрирования токового контура бт при неизменных динамических параметрах якорной цепи, а также влияние динамических параметров якорной цепи при неизменной постоянной интегрирования бт. Из рассмотрения переходных процессов (рис. 1-204-1-207) и аналитического выражения Язам, т следует, что рост постоянной интегрирования бт приводит к снижению коэффициента усиления замкнутого контура, повышению колебательности токового контура и уменьшению быстродействия. Следовательно, чем меньше постоянная интегрирования токового контура, тем меньше сказывается влияние цепи внутренней обратной связи по э. д. с. двигателя. Из выражения для зам, т (р) следует, что уменьшение коэффициента уснлеН12Я замкнутого токового контура определяется сомножителем Ц-б, Мп,д Следовательно, при прочих равных условиях уменьшение бт приводит, как уже указывалось, к росту коэффициента усиления, и наоборот, уменьшение 7ам приводит к уменьшению коэффициента усиления. С ростом электромагнитной постоянной времени якорной цепи Тв растет перерегулирование в кривой якорного тока. Приведенные выше изменения динамических характеристик токового контура имеют самостоятельное значение при работе в режиме ограничения регулятора частоты вращения и, кроме того, естественно оказывают влияние на качество переходных процессов контура частоты вращения привода. Уменьшение коэффициента токового контура приводит к уменьшению быстродействия контура скорости, а рост колебательности токового контура может привести к нарушению монотонности пе]>еходного процесса в контуре скорости при отсутствии перерегулирования выше установившегося значения [1-19]. Отметим отличия в характере переходных процессов реальной системы регулирования, настройка регулятора тока которой выполнялась без учета влияния э.д.с, от идеализированной: 1) уменьшается коэффициент усиления замкнутого контура тока в-г- раз; 2) увеличивается колебательность токового контура; 3) увеличивается площадь регулирования частоты вращения S„ при ступенчатом входном сигнале на входе регулятора ско- рости в раз; J \ п„ J 4) увеличивается площадь регулирования статической просадки частоты враше-пия 5д„ при ступенчатом приложении момента сопротивления. Для приводов, у которых разгон до заданной скорости происходит при наличии момента сопротивления, контур э. д. с. приводит к дополнительному снижению динамического тока. При разгоне в режиме токоограничения установившиеся значения тока: якорного h + Ic динамического h - Ir (1-216) (1-217) где /а - заданный ток, определяемый уровнем токоограничения; /ст - статический ток, определяемый моментом сопротивления. Из изложенного следует, что чем меньше постоянная времени интегрирования токового контура, тем меньше сказывается влияние цепи э. д. с. Поэтому в промышленных системах регулирования постоянную интегрирования токового контура следует делать как можно меньшей, тем более что в современных системах регулирования не превышает 3-4 мс. Вместе с тем следует отметить, что в промышленных условиях нередко бывают ситуации, когда на возможность уменьшения накладываются ограничения, например по условиям Офаничения скорости нарастания якорного тока, или по условиям токораспределения между параллельно работающими преобразователями, при наличии люфтов в механических передачах. Уменьшения влияния э. д. с. на динамику привода можно добиться и другими методами. 1) Если привод не работает в режиме стопорения, влияние э. д. с. двигателя мо-Л{ет быть учтено при настройке регулятора тока, без изменения его структуры. Подробно этот способ изложен в [1-19]. Его целесообразно применять на приводах типа летучие нолсницы, моталки. 2) В [1-23] приведен способ компенсации, суть которого состоит в том, что на вход специально устанавливаемого усилителя подается сигнал, пропорциональный э.д.с. двигателя. В целях упрощения иногда вместо э. д. с. подается сигнал, пропорциональный напряжению. Если не требуется регулирования частоты вращения выше основной, можно подавать сигнал, пропорциональный частоте врашения. Сигнал, компенсирующий малую постоянную времени, можно не подавать. Этот способ компенсации получил распространение в металлургическом электроприводе. Следует отметить, что пр-и реализации этого способа необходимо следить за качеством компенсирующего сигнала с тем, чтобы уровень помех был в нем минимальным. 3) Для преобразователей с раздельным управлением применяют специальные струк-,туры токового контура, улучшающие динамику привода в режиме прерывистого тока. Обычно эти структуры малочувствительны к влиянию э. д. с. двигателя. Одна из возможных структур приведена в [1-21], а также в § 1-44. 1-44. ДВУКРАТНОИНТЕГРИРУЮЩАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ В СИСТЕМЕ ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ - ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА Двукратноинтегрирующая система регулирования частоты вращения применяется в электроприводах, когда по технологическим причинам требуется астатическая характеристика по входному и возмущающему воздействиям. Структурная схема системы регулирования приведена на рис. 1-208. Регулятор частоты вращения выбирается пропорционально-интегральным с передаточной функцией Hv,cm = -~, (1-218) где Zt = Ro. с Сг; = Ra Cj. Эквивалентная постоянная интегрирования контура частоты вращения Вг = ?jfea,ГэмCeФГ2 i?2 fee (1-219) При настройке контура тока на т> > У 2/2, а также при 1,т= V 2/2 и наличии в контуре частоты вращения фильтра или других инерционностей с постоянной времени, равной или большей эквивалентной малой постоянной контура тока , система регулирования хорошо описывается уравнением третьего порядка. Эквивалентная малая постоянная времени контура частоты вращения равна: Т =2Т + Т (1-220) Передаточная функция замкнутой системы регулирования имеет вид: зам.с (Р) •= Тф.еР-Ы (1-221) Частота среза системы выбирается из Зсловия максимального запаса по фазе (1-222) Если ввести в рассмотрение параметр то из условия Яр, d = 1 при ш = Шс находим Вс=й,с- На рис. 1-209 представлено семейство логарифмических амплитудно- н фазо-частотных характеристик. Следует отметить их симметричное расположение относительно частоты среза. Случай а = 2 соответствует настройке по «симметричному» оптимуму. Заметим, что шунтирование емкости Сг в системе, настроенной по симметрично- му оптимуму, приводит к системе с пропорциональным регулятором частоты вращения, настроеьшой по модульному оптимуму. Частота среза разомкнутой системы при настройке по симметричному оптимуму равна частоте среза системы с пропорциональным регулятором частоты вращения, настроенной по модульному оптимуму (1-223) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0014 |