
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [ 61 ] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] ЛКорна цепь r-fl, РТ РН "П=1ш,. Генератор Ее Рис. 1-242. Функциональная схема трехконтурного регулирования системы Г-Д. Возбуйитель Якорная, .PC РТ РИ Генератор цепь Г-Д- Ддигатель eh#i. g.o В,р AUpr TrlP+1 k,,riUr ТэР*1 krAi„ ксйп Рис. 1-243. Расчетная структура трехконтурного регулирования системы Г-Д. !!корно:я цепь Г-Д Двигатель ЗИ „ PC , Шёудт?лв Т- f~~f РИ РНВГ „Генератор кгЕг Рис. 1-244. функциональная схема четырехконтурного регулирования системы Г-Д. РНВГ - регулятор напряжения тиристорного возбудителя. . +У[т+т~ту-\-т1-т. Эквивалентная постоянная времени контура напрягкения + V{T, + - Г)= + Т2 - Т2 . Для контура тока якорной цепи Для контура частоты вращения двига- теля В„ = 8Т. ц,э- Статическая просадка частоты вращения двигателя Гэм СеФ 5. Четырехконтурная система регулирования в исполнении, указанном на рис. 1-244, содержит внутренний контур напряжения тиристорного возбудителя, контуры якорного тока, напряжения генератора и частоты вращения двигателя. Внутренний контур напряжения используется для уменьшения зоны нечувствительности в системе фазового управления тиристорного преобразователя. Расчетная структура для этого случая представлена на рнс. 1-243. Тиристорный возбудитель рассматривается как линейное звено. Для всех рассмотренных систем регулятор частоты вращения или напряжения выбирается пропорциональным. Системы с пропорционально-интегральным регулятором скорости (напряжения) для обжимных станов не получили распространения из-за большого перерегулирования якорного тока при приложении момента сопротивления, что недопустимо для двигателей и генераторов, когда момент сопротивления близок к предельно допустимому. При настройках регуляторов тока во всех структурах не учитывалось влияние э.д.с. двигателя, что вносит определенную погрешность в расчет. В системах Г-Д эта погрешность больше, чем в системах тиристорный преобразователь - двигатель из-за большого значения Та- Поэтому в системах Г-Д иногда применяют компенсацию внутренней обратной связи по э. д. с. двигателя [1-23]. В рассмотренных структурах, выполненных по принципу подчиненного регулирования, характерно большое снижение скорости при приложении момента сопротивления. По этой причине имеются предложения по применению одноконтурных систем регулирования с обратной связью по напряжению с задатчиком интенсивности на входе системы регулирования. 1-48. ВЛИЯНИЕ СПОСОБА УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ НА ДИНАМИКУ ПРИВОДА Способ управления преобразователем оказывает существенное влияние на характер переходных процессов. Определяющим моментом его влияния является наличие или отсутствие уравнительного тока между вентильными группами реверсивного преобразователя. Реверсивные приводы с уравнительными токами обладают лучшими динамическими качествами по сравнению с приводами с раздельным управлением. Однако системы с раздельным управлением имеют меньший состав трансформаторного оборудования и поэтому, как правило, дешевле приводов с уравнительными токами. Это обстоятельство обусловило широкое распространение раздельного управления для приводов средней и большой мощностей. Каждый способ управления имеет свои специфические особенности, оказывающие влияние на динамику привода. Учет этих особенностей является необходимой предпосылкой создания совершенных систем регулирования. Us R3 12 в,г С -I-i- РГ-В 12 lDjr 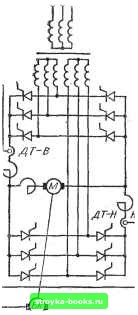 Рнс. 1-245. Структурная схема двухканальной системы регулирования. Системы с уравнительными токами. Наличие непрерывного уравнительного тока исключает вредное действие зоны нечувствительности в регулировочной характеристике, обусловленное нелинейным согласованием систем фазового управления преобразователями. По условиям надежности  Рис. 1-246. Реакция токового контура на ступенчатый сигнал. стоты вращения PC подается на вход регулятора тока РТ группы вентилей, работающих при данном направлении тока двигателя. Ко второму регулятору тока этот сигнал не поступает благодаря разделительным диодам VD. На вход каждого регулятора подан также сигнал задания уравнительного тока. Таким образом, группа вентилей, проводящая Ток двигателя, управляется сигналом, пропорциональным сумме заданных значений тока двигателя и уравнительного тока, а другая группа вентилей- только сигналом задания уравнительного тока. При изменении напряжения иа группе вентилей, проводящей ток двигателя, уравнительный ток регулируется за счет интегрирования динамической составляющей уравнительного тока регулятором группы вентилей, проводящих лишь уравнительный ток. 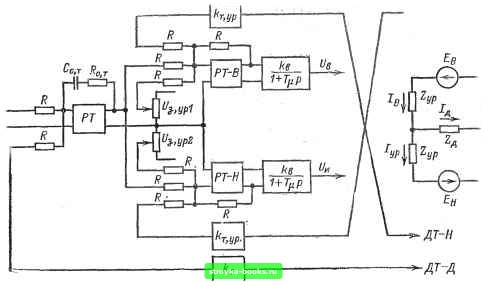 Рис. 1-247. Схема регулирования с перекрестными обратными связями. уравнительный ток поддерживается в заданном диапазоне своего изменения с помощью регулятора, который в свою очередь оказывает влияние на динамику привода. В электроприводе получили распространение две схемы регулирования с уравнительными токами: двухканальная схема и схема регулирования с перекрестными обратными связями. Двухканальная схема с регулятором уравнительного тока представлена на рис. 1-245. Схема предусматривает наличие двух вторичных обмоток трансформа-юра, питающего группы вентилей, и имеет два канала измерения и регулирования тока. Выходное напряжение регулятора ча- При подаче скачком задающего сигнала на вход контура тока (рис. 1-246) при возбужденном двигателе возникают: бросок уравнительного тока, вызванный форсированным изменением напряжения на группе вентилей, проводящих ток двигателя, а также установившееся значение динамической составляющей уравнительного тока, обусловленной возрастающим с постоянным темпом напряжением указанной группы вентилей. Для уменьшения броска уравнительного тока емкость Ci подключают параллельно разделительным диодам. При этом импульс управляющего сигнала подается на вход регулятора, поддерживающего уравнительный ток, и в результате его интегриро- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [ 61 ] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0011 |