
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [ 66 ] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] § 1-51] Системы регулирования с зависимым возбуждением 1-51. СИСТЕМЫ РЕГУЛИРОВАНИЯ С ЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В промышленных электроприводах широко применяется система с двухзонным регулированием частоты враш;ения двигателя. В зависимой системе регулирования скорости (PC) привода магнитный поток возбуждения управляется сигналом, пропорциональным э. д. с. преобразователя Ев, или э. д. с. двигателя Ед, или напряжению якоря двигателя. В зависимости от назначения привода (например, главные приводы или моталки стана) возможны отдельные особенности построения системы регулирования. Одна из функциональных схем для главного привода стана представлена на рис. 1-265. Система регулирования главного привода содержит в своем составе пропорционально-интегральный регулятор якорного тока двигателя, используемый для надежного токоограничения, и регулятор частоты вращения, который усиливает результат сравнения входного сигнала и сигнала обратной связи по частоте вращения. В системе имеются также коррекция коэффициента усиления регулятора частоты вращения, в зависимости от уровня магнитного потока, и регулятор тока возбуждения, который выполняется пропорциональным или пропорционально-интеграль- ньш. Из-за большой индуктивности системы возбуждения оба вида регулятора возбуждения обеспечивают практически одинаковое качество регулирования. В цепь обратной связи по току возбуждения вводится нелинейность, имитирующая кривую намагничивания двигателя. Регулятор э. д. с. в этой системе выполняется пропорционально-интегральным с ограничением выходной величины. Уровень ограничения определяет номинальный поток возбуждения. Коррекция коэффициента усиления контура э. д. с. осуществляется в зависимости от уровня частоты врашения. Когда требования к динамическим процессам не слишком жестки, коррекция коэффициентов усиления контуров скорости и э. д. с. и введение нелинейности в регулятор тока возбуждения не выполняются. Задатчик интенсивности, устанавливаемый на входе системы регулирования, позволяет формировать необходимый динамический ток. Когда существует ограничение по значению тока инвертирования преобразователя, вводится коррекция по току возбуждения или по потоку возбуждения с целью получения неизменного динамического тока при скорости ниже и выше основной. Системам регулирования с зависимым возбуждением присущи свои особенности, которые следует учитывать при проектировании и эксплуатации. Основной вопрос при проектировании - это выбор варианта 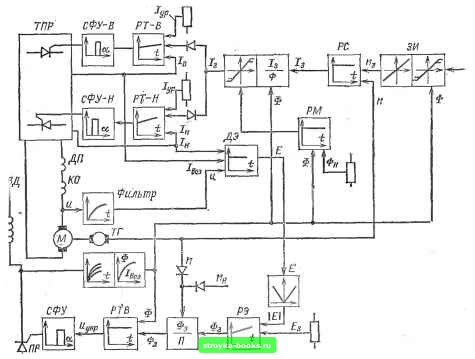 Рис. 1-265. Функциональная схема системы регулирования с зависимым управлением -ii . возбуждением; даигателя постоянного тока. . ,-
Рис. 1-266. Структурная схема электропривода с зависимой системой возбуждения. 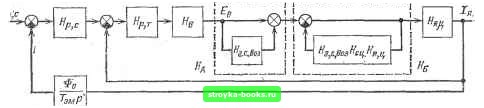 Рис. 1-267. Преобразованная структурная схема электропривода с зависимой системой возбуждения. обратной связи по э. д. с. Возможны три варианта обратной связи: по а д. с. двигателя, по э. д. с. преобразователя или по напряжению на якоре двигателя. Структурная схема системы регулирования с зависимым возбуждением двигателя приведена на рис. 1-266. Электроприводам с зависимым возбуждением присущи при разгоне привода от основной скорости и выше перенапряжения Af/ff иа якоре двигателя. Для уменьшения At/я необходимо повышать быстродействие системы с зависимым возбуждением. Между тем повышение быстродействия снижает устойчивость всей системы регулирования электропривода. Преобразовав структурную схему рнс, 1-266 на более простую (рис. 1-267), рассмотрим особенности трех вариантов зависимой системы возбужденйя. Если зависимая система возбуждения выполнена по э. д. с. преобразователя, передаточная функция звена СЦ (рис. 1-266), учитывающего падение напряжения на участке якорной цепн до точки присоединения датчика, Нсц(р)=0. Прн этом влияние зависимой системы возбуждения на контур регулирования якорного тока эквивалентно введению в контур регулирования якорного тока последовательного звена с передаточной функцией йл(Р) = 1+Яз.е.воз(Р)- Чтобы ослабить неблагоприятное влияние интегральной составляющей этого звена на условия устойчивости контура регулирования якорного тока, необходимо частоту сопряжения (Ол выбирать ниже частоты среза Шт контура регулирования якорного тока по крайней мере в 2-4 раза. Если зависимая система возбуждения выполнена по э. д.с. двигателя. Ясц(р): 1 + Тя р " (Р) Звено Б (рис. 1-267) устойчиво при условии Мз,с,воз< (йвоз (1-262) Передаточная функция звена Б 1 £(Р)= З.С.ВОЗ Таким образом, при выборе параметров зависимой системы возбуждения из условия устойчивости звена Б наличие зависимой системы возбуждения, выполненной по э. д. с. двигателя, не оказывает влияния на динамику контура регулирования якор-, ного тока. Если зависимая система возбуждения выполнена по напряжению якоря двигателя, При параметрах зависимой системы регулирования, удовлетворяющих условию (1-262), устойчивость внутреннего контура (звена Б) обеспечивается. С точки зрения влияния зависимой системы возбуждения иа динамику контура регулирования якорного тока система, выполненная по t/.,i, является промежуточной между системами, выполненными по Вд и Ев. Зависимая система возбуждения по t/я характеризуется простотой схемы, более высокой помехозащищенностью и лучшими энергетическими показателями. Ее следует считать предпочтительной. Перерегулирование в £д можно вычислять по уравнению »о dn где Шс.о - частота среза контура регулирования э. д. с. при основной скорости п= =По\ По -основная скорость. Максимальное перерегулирование имеет место в начале ослабления поля, когда п=По: Яр dn Omax - J, • «со "Г Снижение величины перерегулирования э. д. с. в начале ослабления поля возможно уменьшением инерционного звена в цепи обратной связи по э.д.с. Одним из основных звеньев системы является возбудитель двигателя. Он должен обладать определенным запасом по напряжению, чтобы с помощью форсиров-ки возбуждения обеспечить заданный темп разгона или замедления привода выше основной скорости, а также протекание в системе управления полем переходных процессов, соответствующих настройке регуляторов. Требуемый коэффициент форсировки возбуждения двигателя рассчитывается фор == воз.фор воз.о где С/воз.Фор - напряжение возбудителя при форсировке; 17воз,о - напряжение возбудителя перед форсировкой; Гвоз - постоянная времени системы возбуждения двигателя; Гд - постоянная времени контура демпфирования; /зам - время замедления привода с основной скорости до нуля. В расчетную формулу для /(фор необ--ходимо подставлять значения Гвоз и Гд, соответствующие номинальному магнитному потоку двигателя. При предварительных расчетах подбор параметров регуляторов выполняется обычно для фиксированных координат движения (га, /, Ф, t/вх, /воз, Е), при которых система ведет себя как линейная. Выбор коэффициентов усиления регуляторов, зависящих от уровня потока возбуждения, при отсутствии специальных нелинейностей, компенсирующих изменение коэффициента усиления контура э. д. с, и нелинейности кривой намагничивания производится по средним значениям. При расчете параметров регуляторов контура возбуждения необходимо также учитывать, что в состав малой постоянной контура тока возбуждения входит кроме малых постоянных времени всех датчиков, усилителей и фильтра на входе системы фазового управления еще постоянная времени Гг, обусловленная действием вихревых токов и потока рассеяния; Тд +Т, + Гв Гд + Г, + ГвозУ J-ТяТ,. Постоянная времени Тл + Ts -f- Твоз компенсируется действием регулятора тока возбуждения. Постоянные времени Ti и Ti характеризуют систему возбуждения машины, имеющую передаточную функцию /воз (Р) воз (Р) 7д(Р) + 1 Т, Тт,рЪ + (Гзоз + Г, + Гд) р + 1 ТрЛ-\ (гр+1)(Г2Р + 1) • 1-52. СИСТЕМЫ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ МЕХАНИЗМОВ Системы регулирования положения являются, как правило, нелинейными системами, так как работают в режиме ограничения координат движения. Так, при средних перемещениях ограничивается ток двигателя, а при больших - его частота врашения. Ограничения координат движения определяют в основном время регулирования. Зазор между выходным валом механизма, на котором установлен датчик положения,, и валом двигателя может привести к неустойчивости системы или увеличить время- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [ 66 ] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |
||||||||||||||||||