
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [ 67 ] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] Линейный, регулятор положения Регулятор частоты Параболический регулятор положения Контур тока.
9,55смФ Рис. 1-268. Структурная схема системы регулирования с линейным и параболическим регуляторами положения. регулирования. Нелинейным может быть и регулятор положения, обеспечивающий оптимальное регулирование при ограничениях координат движения. В зависимости от режима работы механизма и параметров привода регулятор положения может быть линейным или нелинейным и регулирование - статическим или астатическим. Статическая система регулирования с линейным регулятором положения. В приведенной на рис. 1-268 системе регулирования с линейным регулятором положения ограничение максимальных значений частоты вращения двигателя и тока достигается ограничением выходных сигналов регуляторов положения и скорости. На рис. 1-269 приведены фазовые траектории движения спстемы в зависимости от коэффициента усиления регулятора положения fep,n, величины Начального рассогласования As, тока статической нагрузки /ст и люфта в механизме в предположении, что контур тока бсзыисршгониый и усиление в контуре велико (fe„,c-»-oo). При коэффициенте усиления регулятора положешя, определяемом кривой 0,1,2, 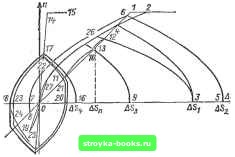 Рис. 1-269. Фазовые траектории движения системы с линейным и параболическим регуляторами положения. и отсутствии статической нагрузки начальное рассогласование A5i отрабатывается без перерегулирования по траектории 3,4, 26, 0. Разгон и торможение привода происходит с ускорением Оог, определяемым током ограничения /ог, т. е. /?г, Начальное рассогласование AS2>ASi отрабатывается с перерегулированием по траектории 5, 6, 7, 8, 0. На участке траектории 8, О, где после пересечения с линией переключения движение происходит вдоль этой линии, система работает в пульсирующем режиме, отрабатывая значительное рассогласование без ограничения тока и скорости. При этом рассогласование, скорость и ток уменьшаются во времени по экспоненциальному закону, что увеличивает время регулирования. При начальном рассогласовании А5з<: <ASi траектория движения 9,10,11,0 имеет участок 1), О, на котором система регулирования работает в пульсирующем режиме. При наличии нагрузки привод разгоняется с ускорением аог(1-/ст ог) по траектории 3,12, тормозится с замедлением «or(l-1-/ст ог) по траектории 12,13 и затем в пульсирующем режиме по траектории 13, 0. Наличие люфта в механизме и датчике положения может привести к автоматическим колебаниям в системе регулирования. Так, при коэффициенте усиления регулятора положения, определяемом кривой О, 14,15, и наличии люфта в системе регулирования будут наблюдаться автоматические колебания с предельным циклом (кривая 20, 21, 22, 23, 24, 25). При отсутствии люфта система будет устойчива (кривая 16,17,18,19). Если перерегулирование по положению недопустимо, то требуемый коэффициент усиления регулятора положения определяется по формуле  CAS. (1-263) где Д5з - заданное рассогласование; С - коэффициент пропорциональности. Формула (1-263) имеет смысл, если система регулирования не работает в режиме ограничения скорости, т. е.
в противном случае коэффициент усиления регулятора положения определяется по формуле 2аог «р,п- C«o Время разгона и торможения привода в режиме токоограничения можно легко определить из фазовых траекторий движения системы. Время торможения в пульсирующем режиме до допустимого отклонения Д5доп определяется по формуле t - In Cka Арп Д5доп где Д5п - отклонение, начиная с которого система регулирования работает в пульсирующем режиме. При конечном коэффициенте усиления регуляп-ора скорости fep.c и наличии постоянной времени контура тока Т., коэффициент демпфирования позиционной системы п связан с ее параметрами следующим соотношением: где gc - коэффициент демпфирования контура скорости. Предполагается, что go 12/2 и ii> > V2/2. В этом случае статическая ошибка определяется из формулы , Д5ст = /стйт/*пйр пйр,с. Астатическая система регулирования с линейным регулятором положения. Астатическое регулирование ошибки по положению будет обеспечено, если регулятор частоты врашения выполнен астатическим. При практической реализации регулятор частоты вращения имеет рассмотренную в § 1-44 настройку, промежуточную меаду модульным, и : симметричным iOJith- мумами. При рассмотренном коэффициенте K>8{K=Ti/T) можно так выбрать коэффициент усиления регулятора положения fep.n, что частота среза такой системы по управлению будет практически равна частоте среза статической системы, настроенной по модульному оптимуму, а перере-г5лирование не будет превышать 10%. При рекомендуемых значениях 32 > >К>8 это обеспечивается, если коэффициент усиления регулятора положения будет определен из выражения [1-21]: Следует учитывать, что с ростом К при такой настройке будет увеличиваться время отработки ошибки при ударном приложении нагрузки. Поэтому значительное увеличение К молено допустить лишь для системы, в которой ударное приложение нагрузки не определяет максимальную ошибку возмущения или если система успевает выбрать ошибку от ударного приложения нагрузки в процессе отработки возмущения по управлению. Система регулирования с параболическим регулятором положения. С целью уменьшить время регулирования н повысить коэффициент усиления системы в зоне малых отклонений применяется параболический регулятор положения (рис. 1-268). Из приведенных на рис. 1-269 фазовых траекторий движения системы видно, что при наличии регулятора с параболической характеристикой (крива.ч О, 27,2) заданное положение отрабатывается без перерегулирования и пульсирующего режима с постоянным замедлением независимо от рассогласования и .нагрузки. Коэффициент усиления параболического pei-улятора положения определяется по формуле СеФ ° где /т -выбранный динамический ток-при торможении без нагрузки. Практически при инерционном конт)фе тока и конечном коэффициенте усиления статического регулятора частоты вращения траектория движения 1,2 (рис. 1-270) лежит выше идеализированной траектории 3,4,0, что приводит при наличии токоограничения к перерегулированию. Чтобы совместить реальную траекторию движения с идеализированной параболической траекторией, необходимо сместить параболическую характеристику регулятора по оси ординат на величину динамической ошибки контура скорости где А 9,Б5С„Ф При этом перерегулирование будет исключено, если линейную часть регулятора начать в точке 6 с координатами А5б= = 64? т2дС/; „ = 4ЙгЛ/ (движение по экспоненте на линейной части). Таким образом, прн данной настройке характеристика регулятора определяется кривой 5, 6, О, а траектория движения - 3, 4, 0.
Рис. 1-270. Фазовые траектории движения системы с параболическим регулятором положения с учетом инерцнонностн контура тока. Превышение траектории движения реальной системы над траекторией движения идеализированной системы может быть также уменьшено прн применении астатического регулятора частоты вращения, настройка которого была рассмотрена при выборе коэффициента усиления линейного регулятора положения астатической системы. Рекомендованное для режима малых отклонений значение /(8 обеспечивает при наличии параболического регулятора малое перерегулирование тока при смене знака тока в начале торможения. При астатическом регуляторе частоты вращения и параболическом регуляторе положения траектории движения определяются кривыми 7, 8,9,4 и 10, И, 12,13. Таким образом, при астатическом регуляторе Превышение реальной траектории движения системы над идеализированной может быть в зависимости от рассогласования уменьшено или практически сведено к нулю. Для этих целей может быть одновременно применено астатическое регулирование и смещение характеристики параболического регулятора. 1-53. СИСТЕМЫ ЭЛЕКТРИЧЕСКОЙ СИНХРОНИЗАЦИИ ВЗАИМНОГО ПОЛОЖЕНИЯ МЕХАНИЗМОВ Для синхронного перемещенвд нескольких механизмов используют механические валы между ними. Некоторые механизмы требуют наряду с синхронным совместным перемещением раздельного управления. В этом случае применяют электромехани- ческие управляемые муфты, соединяющие валы механизмов. В настоящее время механнческая связь между механизмами заменяется электрической с помощью специальных систем регулирования. Такие системы электрической синхронизации взаимного положения механизмов имеют следующие преимущества перед механической связью: 1) уменьшается стоимость установки за счет- упрощения механического оборудования и увеличивается надежность; 2) возможность осуществить более быстрый Переход от режима совместного движения к режиму раздельного движения, так как электромагнитные муфты достаточно инерционны; 3) улучшаются динамические показатели привода за счет уменьшения приведенных к валу двигателей моментов инерции; 4) устраняется неоднозначность взаимного положения выходных валов механизмов при переходе от раздельной работы к совместной при наличии зазоров в механической передаче. Если в режиме раздельной работы осуществлялось движение в противоположных направлениях, то при сцеплении электромагнитной муфты, установленной между валами двигателей, и последующем совместном движении взаимное положение выходных валов механизмов будет отличаться от исходного на величину зазора в механической передаче. В этом случае могут предъявляться высокие требования к точности изготовления механической передачи для обеспечения малого зазора. Прн электрической синхронизации датчики взаимного положения устанавливают непосредственно на выходных валах механизмов, поэтому изменение их взаимного положения может быть лишь во время переходного процесса. На рис. 1-271 приведена структурная схема системы электрической синхронизации двух> приводов, дающая возможность осуществить совместное и раздельное движение. Имеются два варианта построения системы. При первом варианте управлению по каналу электрической синхронизации дается предпочтение перед управлением по каналу совместного перемещения (общее задание скорости). При этом измеряемая ошибка ASc и ее производная An вводятся с различными знаками в контуры регулирования токов. Предпочтение управлению по контуру электрической синхронизации обеспечивается тем, что сигнал ошибки ASc через регулятор синхронизации 4 подается на промежуточный усилитель 2 с коэффициентом усиления ki, а сигнал с выхода регулятора частоты вращения ограничен по значению. В этом случае при достаточно больших коэффициентах усиления и ki сигнал на выходе регулятора частоты вращения в режиме его насыщения намного меньше приведенного сигнала по контуру синхронизации. В режиме насыщения регу- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [ 67 ] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |
|||||||||||||||||||||||||||