
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [ 68 ] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] § 1 -53] Системы электрической синхронизации взаимного полоокения механизмов 209 1-7 i IcTiSignnj 1/Kr <2) Рис. 1-271. Структурная схема системы электрической синхронизации двух приводов. 1 - кондуктор регулирования тока; 2 - промежуточный усилитель; 3 - регулятор частоты вращения; 4 -регулятор электрической синхронизации; S -задатчик интенсивности; 6 - регулятор разности частот вращения. лятора 3 обратная связь по частоте вращения, оказывается разомкнутой, поэтому для обеспечения устойчивости системы вводится сигнал разности частот вращения Ая. Если выбрать ограничение регулятора 3 и промежуточного усилителя 2 равным, то в режиме совместного разгона сигнал ошибки по контуру электрической синхронизации воздействует на снижение частоты вращения одного из двигателей. Если увеличить предел ограничения усилителя 2, то регулирование будет осуществляться за счет воздействия на оба двигателя. При втором варианте построения системы сигнал ошибки ASc вводится непосредственно в контуры регулирования скорости (показано пунктиром). В этом случае нет необходимости вводить сигнал Дя. Прн задании большой скорости в такой структуре происходит накопление ошибки ASc, так как регулированиепри ограниченном выходе регулятора частоты вращения начнется лишь тогда, когда сигнал на выходе регулятора 4 будет близок к сигналу задания скорости и будет осуществляться непрерывно на установившейся скорости и на участке торможения. Такой вариант системы предпочтительнее, если статические моменты приводов близки и не могут вызвать быстрого накопления ошибки. Расчет системы в режиме малых отклонений. Для первого варианта пусть регулятор 4 имеет линейную характеристику и коэффициент усиления ki. Оптимизацию внутреннего контура по разности частот вращения hr„ будем проводить с учетом контуров частот вращения (режим установившейся скорости). Передаточная функция контура частоты вращения Яо(р)=. „ 1-(1-264) щ1т11? + ътр+\ Коэффициент усиления контура кс 2 1 0-265) В соответствии со структурной схемой можно записать: Ч Яа «1 Не (Р) 1+4Яс(р) Нс(р) (1-266) Пх - Я2= Ая- с учетом (1-264) и (1-265) получим уравнение свободного движения системы -Р + щ1т1 -- 0. (1-267) Обозначим коэффициенты уравнения (1-267) через коэффициент демпфирования и частоту недемпфированных колебаний Шп 2?д„«„=-27 ( (1-268) Из (1-267), (1-268) получаем; (1-269) Предполагается, что Из (1-269) следует, что для получения кгк\Ф необходимо уменьшать усиление контура скорости, т. е. увеличивать с. Во втором варианте структуры нет необходимости уменьшать усиление, так как 31=0. Аналогично можно записать передаточные функции для контура ошибки ASc и определить коэффициент усиления регулятора электрической синхронизации ft, fee где д5> 1/2/2 -коэффициент демпфирования контура регулирования ошибки. Для второго варианта структуры fe3= = 0, Ь=?Д„, fe2=fef и 4 = Следует иметь в виду, что в режиме больших начальных отклонений ASc при выбранных исходя из режима малых отклонений коэффициентах усиления системы могут наблюдаться долго не затухающие колебания точно так же, ках это было показано в § 1-52 для позиционных систем. Рассмотрение динамики системы электрической синхронизации на фазовой плоскости с координатами ASc и An должно проводиться с учетом того, что относительное ускорение системы в 2 раза больше, чем ускорение одного привода. Большое начальное отклонение ASc может возникнуть в системе первого варианта за время выбора зазора одним из приводов, а в системе второго-как за счет выбора зазора, так и за счет разных статических моментов при больших заданиях скорости. Динамика в режиме больших отклонений. В этих случаях может возникнуть необходимость применять параболический регулятор электрической синхронизации для оптимальной отработки ASc. В этом случае выбранный ранее исходя из режима малых отклонений коэффициент следует рассматривать как линейный начальный участок параболического регулятора, обеспечивающий приемлемое демпфирование процесса. Изменение взаимного положения двух механизмов осуществляется с помощью задания ASs. При этом механизмы будут перемещаться в противоположных направлениях. Если необходимо перемещение только одного механизма, то на время отработки ASc можно блокировать регуляторы тока и частоты вращения другого механизма. Практически такую схему управления можно реализовать, используя в ка- честве датчиков Si и S.2 сельсины или сн-нусно-косннусные вращающиеся трансформаторы и включая между ними по дифференциальной схеме задатчик (сельсин или соответственно вращающийся трансформатор). Поворот ротора задатчика и будет являться заданием AS3. Для исключенрш останова приводов с токами необходимо либо блокировать регуляторы, либо вводить зону нечувствительности в регуляторе 4. При этом сигнал регулятора прн выходе нз зоны нечувствительности должен вызывать появление токов, превышающих максимальный ток трогания приводов. Часто система электрической синхронизации имеет внешний позиционный контур. Если обратная связь по позиции осуществлена только на одном приводе, а задание с выхода регулятора позиции подается на оба регулятора скорости, то при любом варианте системы электрической син-хронизацни задание AS3 будет отрабатываться приводом, не охваченным обратной связью по позиции. В этом случае можно исключить связь по каналу электрической синхронизации для привода, охваченного обратной связью по позиции. Отработка ошибки ASc двумя приводами возможна лишь в позиционной системе, в которой обратная связь по положению выполнена в виде полусуммы позиций (Si-1--l-S2)/2 [1-19]. 1-54. ЦИФРОВЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПРИВОДА Цифровые системы регулирования выполняют задачу поддержания или изменения по определенной программе частоты вращения электродвигателей и отличаются высокой точностью и простотой сопряжения с цифровыми системами управления, включая УВМ. Использование цифровой системы регулирования скорости в случаях поддержания высокой точности имеет преимущество перед другими системами, обусловленное наличием относительно простых и точных импульсных датчиков частоты вращения. Цифровые системы регулирования скорости электроприводов нашли широкое применение в ряде областей промышленности: металлургической (черная и цветная)-регулирование скорости прокатки, транспортные линии, агрегаты резки и др.; бумажной - регулирование скорости электроприводов бумагоделательных машин; энергетической - регулирование частоты, авиационной, автомобильной и машиностроительной - программное управление и регулирование скорости при испытании агрегатов и узлов машин. Цифровые системы регулирования скорости электропривода могут быть выполне- ны полностью цифровыми или цифро-аналоговыми. Для регулирования скорости промышленных электроприводов наиболее целесообразным является использование цифро-аналоговых систем регулирования, включая имеющуюся элементную базу. Построение цифро-аналоговых систем регулирования скорости электроприводов по принципу подчиненного регулирования параметров позволяет использовать все преимущества подобных аналоговых систем, а также унифицировать цифровые узлы этих систем. • Наибольшее распространение получили следующие цифро-аналоговые системы регулирования скорости электропривода (ЦАСР): а) с использованием цифрового интегрального регулятора (ЦИР) и импульсного датчика скорости (рис. 1-272, й); б) с использованием ЦИР, аналегово-го датчика скорости и импульсного датчика скорости (рис. 1-272,6); 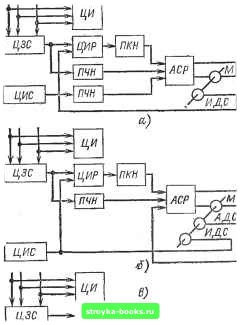
Рис. 1-272. функциональные схемы цифровых систем регулирования скорости электропривода ЦЗС - цифровой задатчик скорости; ЦИР - цифровой интегральный регулятор; ЯДС - импульсный датчик скорости; ПЧН - преобразователь «частота-напряжение»; АСР - аналоговая часть системы регулирования скорое и; М - электродвигатель; ЦИС - ц фрово и меритель скорости; ЦИ - цифровой индикатор. в) без цифрового интегрального регулятора (рис. 1-272, в). При требовании поддержания статической точности заданной скорости, не превышающей 0,2-0,5%, может быть использована более простая ЦАСР, представленная на рис. 1-272, в. Вместо ПЧН в цепи задания аналогового сигнала скорости может быть использован преобразователь кода задания в напряжение (ПКН). В настоящее время ЦАСР выполняется на базе использования интегральных микросхем, что позволяет повысить их надежность, увеличить помехоустойчивость и снизить габариты. ЦЗС в общем случае представляет собой узел, обеспечивающий ввод цифрового задания оператором или от УВМ, корректировку этого задания (плавное увеличение или сниление заданного значения) и преобразование цифрового задания в пропорциональный частотный сигнал; должен обеспечить изменение задания с заданным темпом в тех случаях, когда задание ско- > рости на входе ЦЗС изменяется толчком. Функциональная схема ЦЗС приведена на рис. 1-273. ЦЗС выполняется на основе преобразователя «код - частота» (ПКЧ), а также может быть выполнен работающим в двоичном коде или в двоично-десятичном. Более распространенным является использование двоичнодесятичного кода, который позволяет оператору работать в привычном для него десятичном исчислении, а также осуществлять ручное задание в десятичном виде. При этом индикация задания, хранящегося в счетчике СГ, осуществляется в десятичном виде. Заданное число в виде кода поступает от ручного цифрового задатчнка или от УВМ в регистр памяти RG. По сигналу «ввод задания» содержимое СТ изменяется с -заданным темпом до величины, равной . заданию, хранящемуся в RG\ Madame от УВМ Ручное задание Коррекция Режим работы Ввод задания Рнс. 1-273. Функциональная схема ЦЗС. G - генератор частотных сигналов; БУ - блок управления RG - регистр памяти; СТ - реверсивный счетчик; ДС - дискриминатор кодов; ЦИС - индикатор заданной скорости; ПК.Ч - пре-образова.тель «кодт-частота». [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [ 68 ] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0011 |
||||||||||||