
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [ 69 ] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] Частота следования импульсов на выходе ЦЗС пропорциональна заданной частоте вращения электродвигателя Яз h = nskf. (1-270) где А/=/о,с/яд - коэффициент передачи импульсного датчика частоты вращения (имп/с)/об/мин; fo.c-частота следования импульсов обратной связи, имп/с; Яд - частота вращения двигателя, об/мин. В преобразователе «код-частота» происходит операция умножения опорной частоты fo, получаемой от генератора опорной частоты G, на код цифрового задания скорости кз, хранящийся в счетчике СТ. При необходимости оператор путем подачи сигнала коррекции может плавно уменьшить или увеличить величину задания скорости, хранящуюся в СТ. При необходимости задания или изменения ускорений при разгоне или замедлении электродвигателя в цепь, опорного частотного сигнала, поступающего на вход блока управления может быть включен узел цифрового задания ускорения ЦЗУ, по своей структуре аналогих/ный узлу ЦЗС. ПКЧ осуществляет преобразование числа в параллельном коде в пропорциональную ему частоту. Наиболее удобным вариантом выполнения ПКЧ считается использование для этой цели накапливающего сумматора. Принцип действия - интегрирование с заданной тактовой частотой кода преобразуемого числа на накапливающем сумматоре с выделением сигнала переполнения, частота повторения которого является выходной частотой преобразователя. Преобразователь реализует следующую функцию: fBbix = KiV при /V<S, (1-271) где f вых - выходная частота, Гц; К= =FvxlS -коэффициент преобразования, Гц/ед.; f вх - входная частота, Гц; N - код преобразуемого числа; S - числовой объем сумматора (число состояний, в которых может находиться сумматор), ед. Возможно преобразование числа в двоичном коде N = (/V), = й„ 1 2"-> + й„ 2 2"- + + ... + 00 2»; S = (S)2=2«, (1-272) где а - коэффициент, принимающий значение 0,1; п - число разрядов двоичного кода, число разрядов сумматора. Возможно преобразование числа в двоично-десятичном коде +...4-60 100; S=(S)io=10"4 (1-273) где b - коэффициент, принимающий значения О, 1, 9; т - число десятичных разрядов кода (число тетрад сумматора). Другой распространенный ранее вариант ПКЧ выполнен в виде управляемого делителя частоты, основанного на принципе разложения опорной частоты в ряд частот с их последующим синтезом. Работа такого ПКЧ описана в предыдущем издании справочника. Рассмотренный здесь ПКЧ имеет меньшую неравномерность следовании импульсов на его выходе. Импульсный датчик скорости должен иметь на выходе синусоидальное или импульсное напряжение, частота которого пропорциональна частоте вращения вала без каких-либо погрешностей. Такие датчики осуществляются на различных физических принципах и многообразны по конструктивному исполнению. Электромашинные датчики скорости. Из серийно выпускаемых машин наиболее подходят для этой цели синхронные генераторы трехфазного тока повышенной частоты серий ГИС1 и ГИС2. Использование таких датчиков в ЦАСР затруднено из-за необходимости формировать прямоугольный сигнал из синусоидального, меняющего свою амплитуду; отсутствия признаков направления вращения и ограниченного частотного диапазона. Известно использование частот- но-индукционных, частотно-трансформаторных и емкостных датчиков скорости, но промышленность эти датчики не выпускает. Наиболее перспективны импульсные датчики скорости, выполненные на принципе модуляции светового потока, падающего на светочувствительный элемент. К числу таких датчиков относится датчик скорости типа ПДФ, выпускаемый электротехнической промышленностью. Этот датчик предназначен для использования совместно с системами, построенными на базе УБСР-ДИ (унифицированная блочная система регулирования). Преобразователь «частота-напряжение» строятся по принципу преобразования частоты в последовательность однополяр-.иых импульсов постоянной длительности с последующим выделением постоянной составляющей, пропорциональной частоте. Формирование импульсов постояшной длительности может производиться параметрически с помощью конденсаторов или сердечников с прямоугольной петлей гистерезиса. Более распространенный способ связан с использованием счетных схем. Применение интегральных микросхем позволяет широко использовать счетный способ. На рис. 1-274 приведена функциональная схема преобразователя «частота-напряжение», построенная по принципу счета импульсов опорной частоты. Опорная частота fo от генератора опорной частоты через схему управления поступает на вход счетчика С7", начиная с момента прихода импульса преобразуемой частоты fn на вход триггера Т до момента заполнения объема счетчика. Сигнал переполнения счетчика переводит триггер в исходное состояние. Емкость счетчика выбирается таким -образом, чтобы время его за- полнения было равно требуемой длительности импульса . *п<7-. (1-274) / п.гааж где fn, max - максимально возможное значение преобразуемой частоты. СТ , Рис. 1-274. Функциональная схема преобразователя «частота - напряжение». ст - счетчик; Т - триггер; Ф - фильтр. Сигнал С выхода триггера подается на вход фильтра Ф, выделяющего постоянное напряжение, пропорциональное преобразуемой частоте. Цифровой интегральный регулятор выполняет задачу непрерывного сравнения двух частотных сигналов (fs - частота сигнала задания и fo, с - частота сигнала обратной связи) с выдачей непрерывного сигнала, пропорционального интегралу разности частот во времени; ЦИР представляет собой реверсивный счетчик с узлом разделения импульсов во времени на его входе и с преобразователем «код-напряжение» на выходе. Узел разделения входных импульсов защищает реверсивный счетчик от поступления на его входы полностью или частично совпадающих во времени импульсов с частотой и fo. с Совпадение на входе реверсивного счетчика указанных импульсов вызывает его неправильную работу. Известны два основных способа осуществления узла разделения импульсов: синхронный н асинхронный. Асинхронный способ заключается в том, что если есть частичное или полное совпадение импульсов, то они или блокируются и не поступают на счетчик, или сдвигаются относительно друг друга. Наиболее распространен синхронный способ разделения импульсов с использованием тактовой опорной частоты, значение которой должно быть как ми- нимум на порядок больше, чем сравниваемые частоты; при этом импульсы, поступающие на вход реверсивного счетчика, всегда разнесены во времени на величину, кратную периоду тактовой частоты. Реверсивный счетчик, как правило, выполняется двоичным, что позволяет сократить объем аппаратуры. Вопрос выбора объема реверсивного счетчика рассматривается ниже. Соответственно преобразователь «код-напряжение» выполняется двоичным, что в свою очередь упрощает его аппаратное воплощение. Погрешности ПКН, связанные с изменением напряжения питания, температуры и т. п., не влияют на точность поддержания скорости, так как реверсивный счетчик в любом случае стремится свести разность частот задания и обратной связи к нулю. Выбор параметров ЦАСР скорости электропривода, построенной по принципу подчиненной системы регулирования. На рис. 1-275 приведена схема двукратноин-тегрирующей системы регулирования скорости, построенной по принципу подчиненного регулирования параметров с раздельно выполненными пропорциональным и интегральным регуляторами частоты вращения. Внутренний контур тока с ПИ-регулятором настроен на модульный оптимум. Пропорциональный регулятор частоты вращения также настроен на модульный оптимум. Параметры интегрального регулятора частоты вращения выбираются из условия выполнения соотношений симметричного оптимума. В рассматриваемой цифро-аналоговой системе ПИ-регулятор тока и П-регулятор частоты вращения выполнены на аналоговых элементах. Интегральный регулятор выполнен цифровым с аналоговым выходом. На входе пропорционального регулятора частоты вращения сравниваются аналоговые сигналы: выходной сигнал интегрального регулятора и сигнал обратной связи по скорости. На входе цифрового интегратора происходит сравнение частот задающего сигнала и сигнала от частотного датчика скорости (сигнал обратной связи). nzkf И-регулятор .--. П-регулятор Оптимизированный, контур тока. -
к„ 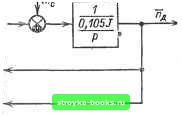 Рис. .1-275.. Структурная схема двукратноинтегрирующей системы сегулпрования скорости электропривода. Прн достаточно высоких частотах задающих сигналов и сигналов обратной связи и как следствие низком уровне пульсаций на выходе цифрового интегратора расчет параметров системы (коэффициента усиления интегратора, коэффициентов усиления П-регулятора и обратной связи контура с П-регулятором) может производиться так же, как и для обычных аналоговых систем. Важным моментом при расчете параметров системы является выбор объема счетчика цифрового интегратора. Необходимый объем счетчика определяет разрядность преобразователя «код-напряжение». Целесообразно иметь меньший объем счетчика цифрового интегратора. При проектировании цифро-аналоговой системы немаловажным становится вопрос рационального выбора структуры системы с точки зрения сокращения объема счетчика цифрового интегратора. Вопросы выбора объема счетчика цифрового интегратора и выбора структуры системы подробно рассмотрены в [1-3]. 1-55. ЧАСТОТНЫЙ АНАЛИЗ СИСТЕМ РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА В основу частотного анализа переходных процессов в замкнутых системах регулируемого электропривода положено преобразование Лапласа. С его помощью устанавливается связь.между показателями переходных процессов, возникающих в таких системах, и параметрами логарифмических амплитудно-частотных характеристик (ЛАЧХ) соответствующих разомкнутых систем. Выявление этой связи позволяет с минимальной затратой времени произвести анализ рассматриваемых систем, выбрать и рассчитать для них корректирующие звенья, сравнить различные варианты построения структурных схем, оценить предельные возможности систем по точности, быстродействию, устойчивости, перерегулированию и другим показателям. Системы регулируемого электропривода подвергаются различным внешним управляющим и возмущающим воздействиям. Реакции на эти воздействия определяют динамические свойства и качество таких систем. В большинстве случаев ограничиваются рассмотрением реакций на изменение задающего сигнала на входе системы (управляющее воздействие) и на изменение статической нагрузки на валу двигателя (возмущающее воздействие). Существует однозначная зависимость между формой ЛАЧХ и реакциями систем на указанные воздействия. Методы построения ЛАЧХ детально рассмотрены в [Г35]. Наибольший интерес представляют реакции на три вида стандартных управляю- щих (или возмущающих) воздействий (рис. 1-276): а) на единичное ступенчатое воздействие (единичный скачок) т(0; б) на единичную импульсную функцию, или дельта-функцию fm(t); в) на линейно возрастающий с единичной скоростью сигнал. Вместо этой реакции 1,0 О, 0,6 0,4 0.2
Время,-Ь Рнс. 1-276. Характерные виды воздействий на системы электропривода. / - ступенчатое воздействие (единичный скачок): 2 - импульсное воздействие; 3 - линейное изменение задания с единичной скоростью. целесообразно рассматривать скоростную ошибку fo(t), которая равна разности линейно-возрастающего сигнала на входе и выходного сигнала (динамическое рассогласование системы). Реакции ft{t), f„(0 и fo{t) или единичные переходные функции рассматриваемых систем позволяют определить наиболее существенные динамические показатели регулируемых электроприводов [1-36]. На рис. 1-277 представлена структурная схема электропривода постоянного тока с системой регулирования скорости в виде, удобном для частного анализа. При этой схеме: 1) поведение электропривода при ступенчатом изменении задания Дйз определяется соотношениями: изменение угловой скорости двигателя до(0 = АОз?т(0; динамический ток якоря (1-275) А£2зи(0. (1-276) где Ед, н - номинальная э.д.с. двигателя, В; Qb - номинальная угловая скорость, рад/с; Гэм - электромеханическая постоянная времени электропривода, с; R - сопротивление якорной цепи. Ом. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [ 69 ] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0023 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||