
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [ 74 ] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] fт = Фи - arctg (1-344) <lio=arctg - arctg . (1-345) На рис. 1-291-1-296 приведены полученные с помощью цифровых ЭВМ номограммы основных показателей переходных процессов в системе 2-1-2, охватывающие апериодический и колебательный режимы. К этим показателям относятся: 1) первый (положительный) максимум при импульсном воздействии /и, max, 2) обобщенное время первого согласования прн ступенчатом вооздействии сОс ti (соответствует максимуму скоростной ошибки); 3) обобщенное время достижения первого максимума при ступенчатом воздействии Ис и, шах-, 4) максимум единичной переходной функции при ступенчатом воздействии /т max, 5) обобщенное время отработки ступенчатого воздействия «с от начала процесса до времени, когда значение /т(0 отличается от установившегося значения не более чем иа 5%; 6) максимум скоростной ошибки fo. max- На рис. 1-297 приведены единичные переходные функции системы 2-1-2 для т = = 2 и я = 1/2, соответствующие симметричному оптимуму. 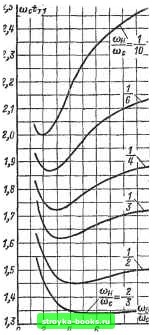 8 10 Рис. 1-291. Обобщенное время первого согласования единичной переходной функции при ступенчатом воздействии. 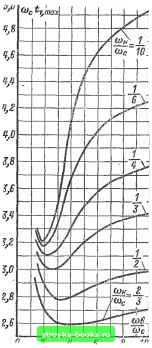 Рнс. 1-292. Обобшеппое время достижения первого максимума прн ступенчатом воздействии.  Рис. 1-293. Обобщенное время отработки ступенчатого воздействия. 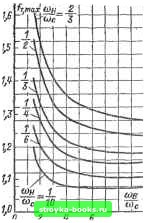 8 10 Рис. 1-294. Максимум единичной переходной функции при ступенчатом воздействии. 0,S« 0,90 D,8B D,8Z D,78 0,71 0,70 Djse C.6Z Рис. 1-295. Максимум единичной переход-вой функции при импульсном воздействии. Основные показатели при этом равны: =2 = 0,825; «е т. шах = 2,9; Шс ty = = 7,2; сос <т1 = 1,4; f-r.max = 1ЛА; «с /о.ша»: = 0,88. Задержанная обратная связь. Наряду с системами регулирования с неизменно!": струюгурой в настоящее время нашли широкое использование системы с переменной структурой, в общем случае обеспечивающие более высокое качество регулирования. В некоторых слу«!аях перемена структуры определяется изменением режима работы ксполнительных органов системы регулирования. Так, например, в регулируемом вентильном электроприводе постоянного тока при переходе от ггепрерывного режима 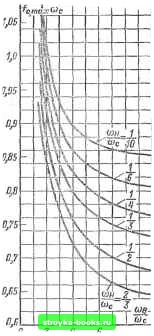 8 10 Рис. 1-296. Максимум скоростной ошибки. проводимости тока к прерывистому видоизменяется структура звена преобразователь-электродвигатель. При этом компенсация указанных . изменений может быть произведена соответствующей коррекцией структуры регуляторов. В общем случае с точки зрения динамических свойств замкнутых систем регулирования перемена структуры эквивалентна режиму работы регуляторов с ненулевыми начальными условиями. Этот релшм, как будет показано ниже, характерен наличием в системе, кроме основных управляющих и возмущающих воздействий, дополнительных возмущающих воздействий, которые оказывают сущест-пенное влияние на характер переходных процессов и в то же время не влияют на установившиеся значения регулируемых параметров. Одной из разновидностей систем с переменной стр5Ч{турой являются системы с задержанной обратной связью, т. е. такие системы, которые замыкаются не с момента подачи управляющего или возмущающего воздействия, а при выполнении определенных условий. Системы с задержанной обратной связью составляют такой класс нелинейных систем, в которых нелинейность проявляется в скачкообразном переходе от одной линейной структуры к другой. Эта особенность указанных систем позволяет применить к ним известные методы структурных преобразований линейных систем (рис. 1-298) и сформулировать следующую мето- дику определения реакции У этих систем на внешнее воздействие X. В месте замыкания системы определяется возмущающее воздействие Х\, заменяющее все фактические задающие и возмущающие воздействия. Воздействие Xi прикладывается к видоизмененной замкнутой системе (рис. 1-289,6), в которой прямые звенья расположены от места замыка- чины, определяемых ненулевыми начальными условиями. При этом все фактические управляющие и возмущающие воздействия иа систему сохраняются, но к ним добавляются воздействия, определяемые ненулевыми начальными условиями системы. Ниже приводятся примеры использования указанных способов для определения динамических свойств некоторых достаточ- 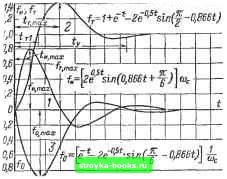 Рис. 1-297. Единичные переходные функции системы 2-1-2 для симметричного оптимума. 2е с sin X 1 - реакция иа импульс = X Jo.866a t--""с ступенчатое воздействие fj, = 1 -- е "с -j. -f 2е~" """с * sin0,866cDg t-- 3 - асоростная ; 2 -реакция на - со„ i ошибка = ,-«>с 2.-°-«сшХ ,866со„ i-f Рис. 1-298. Структурная схема системы с задержанной обратной связью. а -исходная структурная схема; б - преобразованная структурная схема. ния системы до выходного сигнала, а результирующая обратная связь образована остальными прямыми звеньями вместе со звеньями обратной связи исходной системы. Для определения реакции систем с задержанной обратной связью в некоторых случаях целесообразно использовать принцип суперпозиции для непосредственного выделения составляющих выходной вели- VD1 VUZ i-fccj-а-. Eg. п и. Л.
Рис. 1-299. Схема задатчнка интенсивности. а - исходная функциональная схема; б - преобразованная структурная схема ; в - статическая характеристика компаратора. но распространенных в электроприводе систем регулирования. Примером системы с задержанной обратной связью является задатчик интенсивности (ЗИ), содержащий компаратор /, интегратор 2 и инвертор 3 (рис. 1-299). При подаче на вход компаратора ступенчатого управляюш,его сигнала Ез и нулевых начальных условиях на интеграторе нарастание выходной величины интегратора Е будет происходить по линейному закону до тех пор, пока она не достигнет значения Ее, при котором начинает проявляться действие обратной связи ЗИ, так как результирующий входной сигнал компаратора входит в линейную зону его статической характеристики. Преобразованная в соответствии с изложенной методикой структурная схема этой системы представлена на рис. 1-299,6- Ее реакция до момента замыкания определяется выражением v:=v. (..з4<, в момент замыкания системы Ез /гзам г/в = £о = (1-347) где 7 = гзС - постоянная времени интегратора 2; k - коэффициент усиления компаратора /. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [ 74 ] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||