
|
|
|
Главная Развитие народного хозяйства [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [ 82 ] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] мальной погрешности при операции умножения. Масштабы токов и мощностей определены с учетом изменения масштаба, вносимого множительным устройством. Масштаб напряжения возбудителя (в схеме совмещенного с регулятором реактивного тока) принят с учетом исследования процесса при десятикратной форсировке возбудителя. После включения модели в работу дальнейший ход моделирования определяется его конкретными целями. Например, могут быть исследованы переходные процессы в синхронном двигателе при набросе нагрузки в режиме постоянного напряжения возбудителя (при отключенном регуляторе), в частности процессы выхода двигателя из синхронизма. Может быть исследована работа синхронного двигателя с включенным регулятором реактивного тока н определено влияние на переходные процессы постоянных времени регулятора, а также уставки реактивного тока и форсировки возбудителя. Оценка регулятора может быть произведена только после сравнения его показателей с соответствуюшлми показателями регуляторов других типов. 1-57. ЦИФРОВОЕ МОДЕЛИРОВАНИЕ Эффективным методом анализа и синтеза систем автоматического регулирования (САР) электроприводов и следящих систем является метод структурного математического моделирования с применением электронных вычислительных машин (ЭВМ). Цифровое моделирование является разновидностью математического моделиро-, вания с применением цифровых вычислительных машин, обладает существенными преимуществами по сравнешю с моделированием на аналоговых вычислительных установках. Основным различительным моментом цифрового моделирования, по сравнению с аналоговым является использование дискретных форм представления непрерывной информации, позволяющее успешно исследовать с большей точностью количественные и качественные взаимозависимости между элементами сложных .динамических систем. Для решения на ЭВМ указанных задач целесообразно использовать специально для этого разработанный ПАКЕТ ПРОГРАММ. Как известно, динамика любой системы предопределяется структурой последней. Это свойство эффективно используется следующим образом. Составляется открытый АРХИВ подпрограмм, включающих в себя структуру элементарных динамических звеньев, как линейных, так и нелинейных. Открытым АРХИВ оформляется для того, чтобы его содержание можно было пополнять структурами новых динамических звеньев, модифицировать структуру уже имеющихся звеньев, совершенствовать структуры и т.д. Одну и ту же структуру можно выполнить в различной модифика- ции, обеспечивая необходимую точность вычисления и быстродействие. Таким образом, требования к точности, быстродействию, описанию структуры системы назовем ЯЗЫКОМ ОПИСАНИЯ (ЯО). Пользователь с помощью специальной системной программы МОНИТОР получает возможность выбрать из АРХИВА требуемую совокупность программ и увязать их в единую программу, отражающую математическую модель структуры исследуемой САР н позволяющую исследовать динамику выбранной структуры системы. Кроме того, если динамика первоначальной системы не удовлетворяет требованиям технологии, то программой МОНИТОР предусматривается синтез такой структуры САР, которая при дальнейшем анализе системы удовлетворит необходимым требованиям технологии. В ПАКЕТ ПРОГРАММ структурного математического моделирования входит БИБЛИОТЕКА подпрограмм обработки информации, полученной в результате экспе- Открытый. АРХИВ подпрограмм динамических зВетеВ Ввод значений исходных данных,начальных условий, параметров, констант и т.д. Установка нулевых значений интеграторов Остановка счетчика звеньев и присвоение имен динамическим звеньям системы
\Все звенья опрошены ? yJlSSL \8 Изменение аргумента на шаг(Т+1}Т) < I Шаг аргумента регистрации выВран ?У 10 Выполнение регистрации параметров \11 Изменение аргумента регистрации <72 РасчетскончеТ?~)> библиотека подпрограмм обработки информации стоп Рнс. 1-311. Блок-схема программы, составленной МОНИТОРОМ. римента. Пользователь имеет возможность предопределять обработку экспериментальных данных с помощью ЯЗЫКА МАНИПУЛИРОВАНИЯ (ЯМ). Как пример дана блок-схема (рис. 1-311), отражающая принципы работы программы, составленной МОНИТОРОМ. Программа МОНИТОР включает в себя циклы опроса каждого динамического звена исследуемой системы по схеме прохождения управляющего сигнала, интеграторы текущего аргумента и аргумента регистрации параметров системы (для согласования с регистрирующим прибором), а также служит для связи с АРХИВОМ подпрограмм динамических звеньев и БИБЛИОТЕКОЙ подпрограмм обработки информации. Программы МОНИТОР, АРХИВ, БИБЛИОТЕКА должны отвечать требованиям системного програм.мироваиия. Блок / включает в себя открытый АРХИВ подпрограмм динамических звеньев САР с их полным описанием параметров (констант и переменных), стандартизованные обращения и описание динамического звена. Блок 2 производит ввод исходных данных по значениям сигналов управления и начальных условий состояния элементов системы, а также значений внешних параметров констант и т.д., затем устанавливает нулевые значения интеграторов аргумента регистрации и интеграторов динамических звеньев. Блок 5 производит установку счетчика динамических звеньев модели САР в исходное состояние М(1) = 1, а далее именует каждое звено модели M{2)=2,...,M{N)=N. Блок.4 производит определение входных переменных XI системы и динамических звеньев по именам на ка?кдом шаге аргумента. Блок 5 производит определение выходных переменных параметров Х2 системы и динамических звеньев по именам на фиксированном аргументе. Блок 6 производит изменение счетчика динамических звеньев M(N)=N-]-l. Блок 7 производит определение через арифметический оператор IF конца опроса системы на данном шаге аргумента. При выполнении этого условия управление передается блоку 8, при невыполнении - блоку 4. Блок 8 производит изменение аргумента. Блок 9 производит определение аргумента регистрации параметров системы иа регистрирующий прибор. В случае выполнения условия регистрации управленце передается блоку 10, прн невыполнении - блоку 3. Блок 10 производит вывод параметров системы на регистрирующий прибор. Блок производит изменение аргумента регистрации. Блок 12 производит определение конца расчета. При выполнении этого условия управление передается блоку /5, при невыполнении - блоку 5. Блок 13 останавливает процесс расчета. Блок 13 а в случае необходимости производит вычисления, связанные с обработкой экспериментальных данных математическими методами имеющихся в БИБЛИОТЕКЕ подпрограмм обработки информации с помощью ЯЗЫКА МАНИПУЛИРОВАНИЯ (ЯМ). При применении алгоритма программы МОНИТОР к управляющей вычислительной машине, используемой для выработки управляющих воздействий на объект регулирования, блок 12 должен быть построен с учетом работы управляющей вычислительной машины, синхронизированной с безостановочной работой объекта регулирования. Цифровое моделирование отличается от аналогового следующим: 1) Все операции выполняются в цифровой форме с использованием одного из методов численного анализа, со сведением операций интегрирования и дифференцирования к арифметическим операциям. Наиболее простым для программирования является метод Эйлера, согласно которому искомая интегральная кривая заменяется ломаной где h - шаг квантования аргумента. Отсюда t/i+i = f/«-l-Af/i, ahyi = hf(Xi,yi). При ft->0 ломаная Эйлера ложится на искомую интегральную кривую. Прн создании математической модели объекта иа управляющей вычислительной машине, работающей в реальном масштабе времени, можно предварительно определять шаг h счетчика дискретного времени аргумента, что во многих случаях удовлетворяет точности выработки управляющего воздействия. 2) Взаимное соединение цифровых интеграторов осуществляется в соответствии с информацией АРХИВА и ИМЕНАМИ динамических звеньев, хранящимися в памяти машины, сформированной МОНИТОРОМ или вычисленной ею в процессе решения. Физические соединения, такие как на аналоговых моделирующих установках, не производятся, а синтез системы достигается за счет ЯЗЫКА ОПИСАНИЯ (ЯО) и данных, сформированных в процессе эксперимента. 3) Возможно использование различных переменных интегрирования (времени, угла поворота вала, частоты питающего напряжения, перемещения регулируемого объекта и т.д.), т.е. интегрирование и дифференцирование по частным производным. 4) Можно проводить расчет нелинейностей но аналитическим формулам, где Степень приближения к действительности выше, чем на аналоговых моделирующих установках. 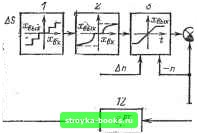
0,105 J-P БОър Рис. 1-312. Структурная схема САР нажимных винтов чистовой клети широкополосного стана горячей прокатки. / - цифровой датчик сигнала положения; 2 - нелинейный преобразователь сигнала рассогласования положения механизма; 3 - задатчик интенсивности, работающий в функции момента электродвигателя; 4 - регулятор частоты вращения электродвигателя нажимных винтов; 5 - фильтр сигнала задания на ток электродвигателя нажимных винтов; 6 -регулятор тока электродвигателя нажимных виитов; 7 - вентильный преобразователь напряжения; 8 - электродвигатель нажимных винтов; S - редуктор,. /О -датчик тока электродБигате.пя; /i - датчик частоты вращения электродвигателя; /г - датчик положения механизма. !--\ Л с, ф\-----L-- I г--1 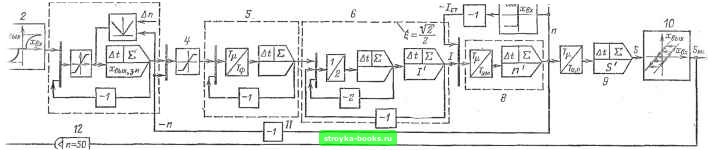 Рис. 1-313. Математическая модель САР нажимных винтов чистовой клети широкополосного стана горячей прокатки. / - нелинейное звено квантования по уровню сигнала LS; г -нелинейная функция (квадратичная парабола с зоной нечувствительности); 3 -задатчик интенсивности, работающий в функции момента; 4 -регулятор частоты вращения, работающий в функции ограничения выходного сигнала; 5 - апериодическое звено (фильтр); 6 - колебательное звено (контур тока с коэффициентом демпфирования t,= Y2/2); 7 - нелинейный элемент типа «сухое трение» (приложение статического момента); 8 - интегратор маховых масс; S - интегратор отработки положения механизма нажимных винтов; 10 - нелинейность типа «люфт» самотормозящего механизма; 77 - отрицательная обратная связь по частоте вращения; 12 - звено чистого запаздывания сигнала обратной связи датчика положения механизма. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [ 82 ] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] 0.0013 |
|||||||||||||||||||||||||||||||||||||||||||||||||