
|
|
|
Главная Линейные элементы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [ 133 ] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] Перепишем (8.109) в виде «нач - « = J "нач + j пгч + J [« (О - «нач] dt. (8. ПО) О Гр о Если вычесть из (8.110) равенство (8.108), то получим откуда J «;.ач + J [« (О - «нач] = О, (f р - Гр) ыГ,ач = f [«нач - « (0] (8.111) Так как обычно u, > ы(/) (скорость убывает), то правая часть в ф-ле (8.111) положительна, следовательно, положительна и левая, т. е. fр > Гр. В соответствии с ф-лой (8.111) можно записать (Гр - Гр) < Гр та.х [ич - « Щ, . откуда или Откуда „ max [«„3,, - «(0] Гр-Гр<ГрУ. Гр-Гр<[Гр + (Гр-Гр)]у, т. е. (Гр-Гр)(1-у)<Гру. (8.112) (8.113) (8.114) Таким образом, можно записать для абсолютной и относительной погрешностей: 0<Гр-Гр<-рГр, (8.115) (8.116) (rp-rp)/rp<Y/(l-v). Если задана допустимая относительная ошибка преобразования бдоп, то коэффициент нелинейности должен удовлетворять условию у/ (1 - V) .- бдоп, откуда Y<6on/(l+блон). (8.117) Обычно бдоп < 1. и поэтому должно выполняться условие Т<6доп. (8.118) Надо, однако, иметь в виду, что на точность преобразования, помимо нелинейности пилообразного напряжения, влияет и ряд других факторов: температурная нестабильность рабочего хода и начального уровня напряжения на конденсаторе, запаздывание начала рабочего хода, обусловленное инерционностью транзистора, запаздывание конца рабочего хода (т. е. момента прекращения разряда конденсатора) относительно момента достижения напряжением и некоторого заданного уровня Ед. Если, например, сравнение и и Ео осуществляется при помощи диода, то диод отпирается практически только при и <сЕо и после этого, кроме того, необходимо некоторое время для возрастания напряжения на базе транзистора до нулевого уровня. В предыдущих разделах были получены количественные оценки, учитывающие влияние указанных факторов. 8.13. ПРИНЦИПЫ ПОЛУЧЕНИЯ ИМПУЛЬСОВ ТОКА ПИЛООБРАЗНОЙ ФОРМЫ Получение идеального пилообразного тока в катушке. Токи пилообразной формы широко используются для создания временной развертки в электроннолучевых трубках при магнитном отклонении луча. Поэтому задачу создания пилообразного тока рассмотрим применительно к случаю, когда нагрузкой генератора является отклоняющая катушка. Эквивалентную схему последней можно представить состоящей из индуктивности Lq, активного сопротивления Ro и эквивалентной емкости Со (рис. 8.22й). Сопротивление Го, показанное на рисунке, обычно включается параллельно отклоняющей катушке для сокращения длительности переходных процессов. Для того чтобы отклонение пятна на экране трубки происходило с постоянной скоростью, напряженность магнитного поля, создаваемого катушкой, а следовательно, и ток Io должны изменяться во время рабочего хода по линейному закону (рис. 8.22а) io = kit. (8.119) Найдем форму тока ir, создаваемого генератором, и напряжение на катушке Uq, при котором обеспечивается линейное нарастание тока Io. Из рассмотрения схемы рис. 8.22а получаем Щ = «io + Ujio = Eo- + Roto = kiLo + kiRot. (8.120) Форма напряжения Uo{t) показана на рис. 8.226; во время рабочего хода Uo представляет собой постоянное напряжение kiLo, на которое наложена линейно изменяющаяся составляющая kiRot. При этом постоянное напряжение kiLo, приложенное к индуктивности Lo, вызывает линейное изменение тока в ней, а линейно нарастающая составляющая kiRot компенсирует увеличение падения напряжения на активном сопротивлении .о катушки. Прл отсутствии составляющей kiRot падение напряжения Urq во время рабочего хода с ростом тока io не увеличивалось бы, а уменьшалось, что привело бы к снижению скорости нарастания тока io. Рабочий участок тока имел бы в этом случае экспоненциальную форму вместо линейной. i JL -l 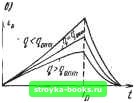 "ко i =г Рис. 8.22
Важно отметить, что для получения линейного рабочего хода тока в катушке необходима определенная величина отношения q между начальным скачком и скоростью нарастания- напряжения на катушке. Эта величина qo.. = kiLJkiRoLJRo (8.121) не зависит от скорости kt нарастания тока, а определяется лишь параметрами катушки. При необходимости увеличить скорость тока следует пропорционально увеличить начальный скачок и скорость нарастания напряжения на нагрузке. В тех случаях, когда q ф опт, появляется нелинейность рабочего участка пилообразного тока (рис. 8.22в). Так, при q > qoa-v [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [ 133 ] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] 0.0013 |
||||||||||||||||||||||||||