
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [ 114 ] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] Условие трансверсальности (10.40) принимает вид ijp(t,)=-Fxitf). (10.155) Запишем решение уравнения (10.154), используя его нормированную фундаментальную матрицу Z [t, t), удовлетворяющую условию Z(t, t) = Е при любом f £ [tg, t,]: z{()Zit,t)z{t). (10.156) Представим фундаментальную матрицу в соответствии со структурой уравнения (10.154) в виде fZnitJ) z,,it.n\ I (/./) z,At,nJ где Zjy-матрицы размерности n x п. Используя это представление и приняв f - t,, из (10.156) получим x{t)==Zn(t,t,)x(i,) + Z,,it,f,){f,); (0-Z,a (t. t,) X (t,) + Z {f, t,) (tf), или после подстановки (10.155) xit)=[Z,At,t,)~Z,At.t,)F]{tf). <lfit)-[22i{t,t,)~Z,lt,tf)F]x{t,). Исключим из полученной системы уравнений х (tf): it) = [Zai {t, t,)-Z {t, tf) F] [Z„ (/. tf)-Z,, (t, tf) F]- > X (0. При этом, по существу, граничное условие из точки tf на временной оси переносится в точку t £ [to, tf\. Сравнивая оптимальный закон управления (10.153) после подстановки в него последнего выражения для с оптимальным законом управления (10.138), получаем К(/)= [Zai it, tf)-{Z (t. fy)Fl[Zii (t, tf)-Z,, {t,tf) Fl-i (10.157) и в частном случае, когда F = О, K{t)ZAt,tf)Zu\t,t,). flO.158) Соотношения (10.157) и (10.158) определяют решение ма трнчного уравнения Риккати через фундаментальную матрицу системы, состоящей из уравнения объекта и уравнения Эйлера-Лагранжа для сопряженной координаты. Они могут быть использованы для определения матрицы К (О ври решении задач синтеза оптимального линейного регулятора. Пример 10.23. Простейшая задача пере-*!-хвата. Решим изложенным методом прогонки задачу перехвата, несколько отличную от задачи, рассмотренной в [5]. Пусть цель движется равномерно и прямолинейно со скоростью 1)ц. Перехватчик " движется с постоянной скоростью Va- Курсовые углы цели </ц и перехватчика ft, (рис. 10.6) достаточно малы: 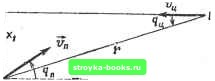 Рис. 10.6 19д1 < 1; кпК 1- (10.159) При этом условии в первом приближении можно записать = = - "пЯа, Чи = "п. гда - угловая скорость перехватчика. Принвмая угловую скорость за управление и введя обозначения Яп - 2, = и, можно записать X =А x-fB и. Примем за начальное время 4 = 0. Время перехвата if = rjvc, Гд - - начальное расстояние, Vc -скорость сближения перехватчика и цели, в силу (10.159) в первом приближении Vc = Vn + Vc, г=ОЦ и промахом будет х (tf). Потребуем, чтобы промах был равен нулю. Тогда граничные условия имеют вид х(<о) = Л х,(<,)=0. Рассмотрим задачу синтеза оптимального управления с обратной связью при двух разных критериях оптимальности. 1. Пусть критерий оптимальности имеет вид • этом случае и матрица D принимает вид 0 -Vn О 0> 0 0 0 1 0 0 0 0 \0 es Кп О/ Непосредственно соотношениями (10.157) или (10.158) воспользоваться нельзя, так как они получены при условии, что правый конец траектории свободен, а в рассматриваемой задаче координата (tf) закрепле иа. В данном случае условие трансверсальности имеет вид ipg (tf) =0. Из (10.153) оптимальное управление ы = ф2, (10.160) поэтому задача сводится к определению ipg как функции от х. Так как матрица D постоянна, фундаментальная матрица 2 (t, t) = Z (t - t)- = lliV (t - t)\\.C учетом граничных условий из соотношения z (f) = = Z (т) T{tf), где z= I 1 и x - t-tf, получаем: xi (t) = г,2 (T) X2 (tf) + 2,3 (T) Ф, (tf): Xz(t)= 222 (t) X2 (tf) + 223 (т) l (h) Ф2 (t) = 242 (t) 2 {tf) + 243 (x) 1 (</) • Из первых двух уравнений найдем (tf) иф, (tf) и подставим в последнее уравнение. Тогда получим Ф2 (0= Y f f (0-213 (Т) Х2 (01+243 (Т) [2,2 (т)Х ХХ2(0-"Й2(Т)Х,(01}. (10.161) А = 2,2 (Т) 223 (т)-2,2 (т) 2,з (Т). (10. 162) Найдем фундаментальную матрицу 2 (т). При постоиииой матрице D (10.163) 2 (т) = е*= Е + Dt+D2 т2 +...+- D" т"+... . Как нетрудно вычислить 0 0 0 -1)Д о e2 v„ ООО ООО D2&2(ft-I)o2. D3-- ООО О О О О/ (10.164) ,2ft-H g2(ft-I)p3. л = 2,3..... Подставив (10.164) в (10.163), получим: 222(t)=l + ei-J +е*- +...= 4-(е"+е~); [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [ 114 ] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |