
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [ 140 ] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] где Xi - это г-е пробное состояние, выбранное случайно и сохраненное в памяти в случае удачной пробы; У (х;) - вычисленное в г-м пробном состоянии значение функции качества и сохраненное в памяти в случае удачной пробы; х- - пробный шаг; J (х;) - значение функции качества на г-м пробном шаге. При равномерной плотности распределения пробных шагов поиск разделяется на k этапов из Nj пробных шагов, где /= 1, 2, .... к. Каждый пробный этап осуществляется внутри гиперпараллелепипеда в пространстве состояний X, т. е. * G<*> < x,<G<*>j, t = 1, 2,..., rt, (П .61) причем стороны гиперпараллелепипеда с каждым /-м этапом уменьшаются в с > 1 раз по сравнению с (/ - 1)-м этапом в соответствии с формулой: а<р = х("/-1) + [а\{-" -а</-))/ 2с; (11.62) где x/J-i)- точка, соответствующая пробному шагу с наименьшим значением функции качества из всех проб на (/ - 1)-м этапе. Несмотря на равномерную плотность распределения пробных шагов внутри каждого этапа, происходит увеличение плотности распределения от этапа к этапу за счет уменьшения зоны поиска (11.62), т. е. Pj (х)<с/" П p-a/j, (11.63) где Pj (х) - плотность распределения пробных шагов на /-м этапе; П (а/, :- a!i,) - объем гиперпараллелепипеда на /-м i= I " этапе. Таким образом, на каждом пробном этапе осуществляются случайные пробные шаги, из которых выбирается шаг с наименьшим значением функции качества, а затем зона поиска сужается около этой выбранной точки и снова производятся случайные пробные шаги до попадания в окрестность глобального экстремума. Иногда целесообразно пробные шаги на каждом последующем этапе распределять не равномерно, а по нормальному закону, например Р (x) = 11 /(2я)"/2 о-}] ехр { - (1 /2а?) х - х; Р}. (11.64) Сд при J [х,) < J (Xii); о<-1 ~qf- 1 при J Xj) > J (x, i). d - исходная дисперсия; О •< <7 <Г 1. Итак, случайные пробные шаги нормально распределены со средним значением, совпадающим с наилучшей величиной функции качества из всех проб этапа, а дисперсия уменьшается при неудачных шагах и увеличивается до исходного значения при удачных шагах. Обычно время, отводимое на поиск, ограничено, поэтому целесообразно управлять не только плотностью распределения пробных шагов внутри этапов, но и количеством таких проб. Например, в начале поиска количество пробных шагов внутри этапа может быть относительно небольшим, что связано с приблизительным выделением «подозреваемой» на глобальный экстремум подобласти, а затем для более точного определения пачожения глобального экстремума используется оставшееся количество пробных шагов. Примеры поисковых самонастраивающихся систем Самонастраивающаяся система с поиском по методу градиента. Блок-схема системы представлена на рис. И. 12. Система работает по принципу синхронного детектирования с модуляцией, основанному на методе градиента. На рабочее движение системы накладывается гармоническое поисковое движение с небольшой амплитудой, вырабатываемое генератором Г и устройством формирования опорного сигнала УОС, т. е. Xt = Xig + Uoi sin (Hit. (11.65) На выходе объекта колебательная составляющая функции качества J (х) изменяет фазу в зависимости ст текущего положения рабочей точки относительно экстремума (рис. 11.13). OCcn Рис. 11.12 С помощью синхронного детектора фазы ДФ осуществляется перемножение сигнала J (х) и опорного сигнала с генератора: «011 = «оп sin Ы + ц>). (11.66) После отфильтро-вания переменной составляющей с помощью фильтра Ф получают сигнал, пропорциональный производной функции качества по X, т. е. dJ (x)/dx, поступающий на исполнительное устройство И У. В точке экстремума этот добавочный сигнал равен нулю. Многоканальный статистический оптимизатор со случайным поиском. Схема и принципы работы самонастраивающейся системы со случайным поиском описаны в 12]. В системе реа-лизиван ряд шаговых алгоритмов поиска, например поиск с возвратом, поиск с пересчетом и т. д. Система состоит из одинаковых, параллельно работающих каналов, выбранных по числу оптимизируемых параметров объекта. Блок-схема одного из каналов представлена на рис. 11.14, а. 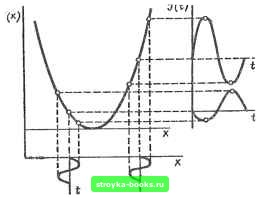 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [ 140 ] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |