
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [ 141 ] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] Блви определения а) знака приращения функции качества
Генератор случайных сигналов Источник Память
Ключ Схема реверса Ключ » Исполнительное устройство 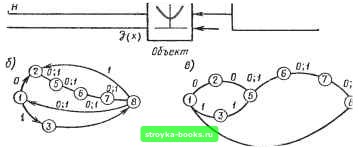 Рис. 11.14 Основным блоком оптимизатора является блок генераторов случайных сигналов, с помощью которого вырабатываются последовательности разнополярных импульсов с одинаковой амплитудой и длительностью. Эти импульсы через ключевые схемы поступают на исполнительные устройства для изменения регулируемого параметра объекта в положительную и отрицательную стороны поиска экстремума. В результате воздействия исполнительных устройств изменяется функция качества. Знак приращения функции качества фиксируется и запоминается в блоке определения знака. Работа оптимизатора осуществляется циклически с помощью блока команд, на вход которого подается сигнал (А == /г G/. где 0 при ЛУ (х)<О (удачны й шаг); 1 при АУ (х) > О (неудачный шаг); ду (х) = У [Xjl-y [x. il; (11.67) 0 при Я О (ограничения соблюдаются); 1 при Я<:;0 (ограничения не соблюдаются, следует сделать обратный шаг). Сигнал р изменяется следующим образом: у 0 0 11 к О 1 О 1 v-hiy.y) О I I 1 Значения р определяют так; 0 при hJ (х)<, О f\ Н 0>\ 1 при [ДУ (х) > О Л Я < 0] [ДУ (х)< О Л < (1 -68) < 0] V [ДУ (X) > О Л Я > 0]. На рис. 11.14, 6, в представлены направленные графы последовательного изменения состояний блока команд для поиска с возвратом и пересчетом. Индексы у стрелок, соединяющих вершины графа,, соответствуют возможному переходу блока команд из одного состояния в другое в зависимости от поданного сигнала р, определяемого из (11.68). Состояния блока команд пронумерованы следующим образом: / - определение знака приращения показателя качества ДУ (х); 2 - запоминание показателя качества; 3 - обратный шаг; 5 - сброс памяти генератора случайных сигналов; 6 - запуск генератора случайных сигналов; 7 - рабочий шаг; 8 - установление функции качества на выходе объекта. Принципы построения беспоисковых самонастраивающихся систем. Такие самонастраивающиеся системы обладают существенным преимуществом по сравнению с поисковыми системами в отношении быстродействия, поскольку в них отсутствуют процессы поиска, замедляющие работу системы. Кроме того, поисковые движения, как правило, создают заметные возмущения для работы основного контура. Часто такие возмущения становятся недопустимыми по конструктивным соображениям, например поисковые колебательные возмущения могут преждевременно выводить из строя исполнительные механизмы системы управления. Однако беспоисковые самонастраивающиеся системы, так же как и поисковые, решают аналогичную задачу адаптации динамических характеристик системы в условиях изменения меры качества под воздействием управляющих, параметрических и внешних возмущений. Беспоисковое определение условий экстремума функционала качества позволяет получить темп процесса адаптации, соизмеримый с темпом переходных процессов в системе. В беспоисковых системах используют несколько различных принципов аналитического определения условий экстремума, которые базируются на компенсационных подходах, например принцип инвариантности или сравнения с эталоном-моделью, либо на идентификационных подходах, позволяющих определять связанные с функционалом качества параметры или характеристики управляемого процесса. Принцип инвариантности. Если в системе автоматического управления предусматривается компенсация влияния возмущающих воздействий на регулируемые координаты, то такая система становится инвариантной, т. е. независимой, по отношению к этим воздействиям. Так как в самонастраивающихся системах функция качества управления может изменяться под действием параметрических и внешних возмущений, то, компенсируя влияние этих возмущений, можно добиться стационарности функции качества и обеспечить работу системы в экстремальном режиме. Пусть система автоматического управления описывается уравнениями вида an {р, t) Xl -fcia (р, /) Хг +... -Ь Ol,, х„ = bi (р, t) /1 (/); «21 (Р, О Хг + «22 (Р, t)x + ... + х„ = {р, I) и (0; Ощ (Р, t) Xl -f ап2 (p. О Х2 + ... + х„ = Ь„ (р, i) /„ (/), (11.69) где Xl, Хп - регулируемые координаты; а,-; (р, t), Ь, (р, t) - дифференциальные операторы (полиномы от р с переменными коэффициентами); /„ (/)-внешние возмущения; /=1,2,..., п; / = 1., 2, п, или в более компактной форме S «Я = ) fi 2- - • - «•= 1 При действии параметрических возмущений происходит отклонение операторов системы от номинальных значений, равных a]i{p,t) = aji{p), (11.71) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [ 141 ] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |
||||||||||||||||||||||||||||||||||||||||