
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [ 148 ] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] параметры автоколебаний а = iAkJn) («о + А«о (01 [715-2/(71 +72)1: (11.157) cu = l/l/"Tin. Пусть экстремальный режим определяется следующими значениями: а = Go; К (О = Д"о (О = 0; А2 = 0. (11.158) тогда можно определить значение опорного напряжения 2 (оо): г(ао) = 2, = £/ф! = /гф1у(01. (П.159) Линеаризация (11.159) по постоянной составляющей дает 2 (Go) = 2VoO)o/n. (11.160) Учитывая (11.157) и (11.158), получим 2 Ы = Uo (8/гф kjn) [VT\f:i{T, +Т]. (11.161) Таким образом, при изменении коэффициента (О будут изменяться амплитуда автоколебаний и среднее выпрямленное значение напряжения z. Появляющееся рассогласование Az - Z (ао) - Za будет воздействовать на изменение уровня ограничения релейного элемента До (О таким образом, чтобы уменьшалась до нуля величина Az. В случае необходимости регулирования нескольких параметров автоколебательная система может содержать большее число нелинейных взаимосвязанных контуров что позволяет организовать многочастотные автоколебательные режимы. Адаптивные системы с переменной структурой. В системах с переменной структурой за счет нелинейного сочетания различных линейных структур удается организовать специфическое вырожденное движение - скользяш.ий режим, или режим перехода от движения, соответствующего одной линейной структуре, к движению, соответствующему другой линейной структуре, с помощью логического переключения связей в системе в зависимости от ее фазового состояния. Такой переход осуществляется с высокой частотой, в пределе стремящейся к бесконечности. После возникновения скользящего режима движение системы происходит вдоль граншщ! переключения и становится независимым от параметров управляемого объекта. Если параметры объекта изменяются в процессе функцио- нирования системы, то такие изменения не оказывают влияния на динамические свойства системы с переменной структурой, находящейся в скользящем режиме. Следовательно, организуя в системе с переменной структурой скользящий режим, удается добиться независимости ее движения от параметрических возмущений. Пусть система с переменной структурой описывается дифференциальными уравнениями dxi/dt = Xi+i, t = l, 2, n-1; dxjdt==~ ± adt)Xi-u, i= 1 где Xi - фазовые координаты; щ (/) - переменные параметры системы; и - управление. Обычно диапазоны изменения параметров Gj (t) бывают известны: fl:/min<fl:,:(0<fl<niax, t= 1, 2, п. (П.163) Управление выбирают в следующем виде; . . « = 2 ф,х„ . (11.164) /= I где коэффициенты г];, являются разрывными функциями фазового состояния системы {а,прнх,>0; \f>i при gXi<:o, ё= 2 i •f пФ Cl-постоянные величины. /= I Гиперплоскость g" = О является поверхностью разрыва коэффициентов i, т. е. вдоль этой поверхности происходит движение в скользящем режиме. Так как уравнение движения по поверхности g" = О зависит только от постоянных коэффициентов Ci, выбираемых из условия обеспечения требуемого качества переходных процессов, то движение в скользящем режиме не зависит от переменных параметров Gj {f). Для „обеспечения существования скользящего режима необходимо выбирать значения постоянных коэффициентов ai и Pi в соответствии с условием gdg/dt<ZO или неравенствами Ui > max [Cj i -Ui (t) -c„ i + a„ (/) cJ; <min [c,-i -Ui (t) -Cn-iCi + an (t) с]. (11.166) Очевидно, при постоянных значениях ttj и условия (11.166) накладывают ограничения на выбор коэффициентов поверхности скольжения Ct из допустимой области < < Ci < Cjmax при изменениях параметров at (t) в заданном диапазоне аг„1„ < at (t) < Сгтах- На рис. 11.21 для двумерного случая штриховкой показана допустимая область изменения коэффициентов поверхности скольжения Cj, полученная из условий обеспечения скользящего режима. Фазовой траектории, охватывающей наибольшую-площадь, соответствует наиболее быстрый переходный процесс, поэтому Стах выбрано из условия (11.166), а Cmin - из условия максимальной заданной длительности переходного процесса ах- Если в экстремальном режиме функционирования системы необходимо поддерживать максимальное быстродействие в переходных процессах, то в процессе изменения параметров объекта at (t) необходимо определять значение Стах и перестраивать коэффициенты поверхности скольжения при их несоответствии этому значению. Такая задача может быть решена адаптивной системой с переменной структурой, использующей информацию о наличии скользящего режима в системе. Принцип действия адаптивной системы с переменной структурой заключается в следующем. В начале переходного процесса в регуляторе формируется функция переключения go " Cmin Xi Хг, (11.167) где Cmin - определяется либо по максимальной заданной длительности переходного процесса, либо из условия 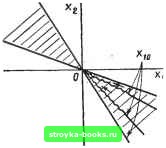 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [ 148 ] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0014 |