
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [ 157 ] [158] [159] [160] [161] [162] [163] [164] [165] [166] Сенсоры физических свойств выполняют функции: измерения усилий и моментов; измерения плотности и давления жидких, твердых и газообразных веществ; измерения температуры; определения цвета и запаха. Сенсоры химических свойств определяют химический состав веществ с помощью анализаторов типовых химических реакций. Несмотря на столь большое разнообразие сенсорных устройств, их использование для создания адаптивного управления роботами оказалось непростым главным образом по двум причинам: во-первых, из-за сложности технической реализации адаптивных законов управления средствами традиционной автоматики и, во-вторых, из-за экономически невыгодного пути, связанного с применением до недавнего времени больших ЭВМ для обработки информации в системах очувствления, адаптации и управления роботами. Современные сверхэкономичные и малогабаритные микропроцессорные средства управляющей и вычислительной техники открыли путь для более широкого внедрения в практику роботостроения более совершенных методов управления роботами со сложными, но легко реализуемыми на микропроцессорах алгоритмами обработки информации и адаптивного управления. Методы обработки сенсорной информации для адаптивного управления роботами. Сами по себе сенсоры еще не решают задачу создания адаптивного управления, так как на выходе сенсоров образуются только исходные данные в виде токов, напряжений, интенсивностей освещения, чисел и т. п. В результате обработки этих данных формируется информационный образ или информационная картина об объектах внешней среды, по которым уже можно адаптировать движение робота, поэтому среди многочисленных методов обработки информации широкое распространение получили методы распознавания образов. Распознавание образов - это общее название для процессов обработки сенсорной информации, связанных с определением чаще всего геометрических форм, места расположения и ориентации в пространстве предметов. Распознавание образов - обязательный элемент для визуальных систем очувствления, построенных с применением телевизионных или фоточувствительных сенсоров. Адаптивные роботы с техническим зрением на основе видиконов, линеек и матриц ПЗС (приборов с зарядовой связью), фотодиодных элементов начинают широко внедряться в практику, поэтому подробно рассмотрим методы обработки визуальной сенсорной информации. Большинство таких методов имеет универсальный характер и с незначительной модификацией применимо также для обработки сенсорной информации иной природы, например тактильной, звуковой и т. п. На рис. П.29 представлена общая схема адаптивного робота с телевизионным визуальным очувствлением. Назначение робота заключается в снятии с движущейся конвейерной ленты произвольно ориентированной детали путем определения с помощью телевизионной камеры ее положения, ориентации и скорости движения и формирования с помощью ЭВМ в зависимости от полученных данных адаптивных сигналов управления на приводы робота. Заметим, что для решения задачи необходимо воспринять изображение телекамерой, разложить полученную сцену на информативные области, дать описание образа детали, распознать деталь, интерпретировать полученный образ и PoSorn 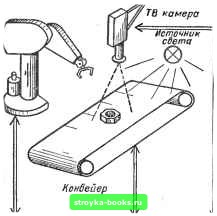
Минро-ЗВМ передать необходимые команды управления на робот для захвата детали. Таким образом, процесс адаптивного визуального управления включает в себя несколько этапов (рис. П.30): восприя-ятие изображения объекта или- сцены; представление образа; распознавание образа; интерпретация сцены; синтез адаптивного закона управления. Восприятие изображения объекта - это процесс преобразования оптических сигналов в аналоговые электрические Восприятие f изо6ран<еиай объекта Аналоговый электрический [ сигнал Цифровой ьи&нал 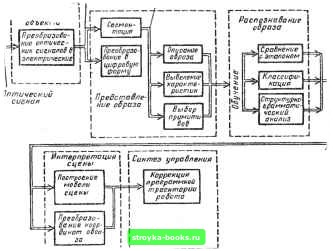 Образ с координата -ми и параметраыи в цифравай форме Рис. 11.30 сигналы в зависимости от яркости или интенсивности отражающих поверхностей объекта. Качество восприятия изображения определяется не только характеристиками визуальных датчиков, но и возможностями для предварительной обработки оптической информации. Основным способом предварительной обработки является использование так называемого структурированного освещения сцены. Дело в том, что произвольное освещение рабочей сцены, как правило, непригодно для получения изображений с необходимой контрастностью, без бликовых отражений, затенений и загораживаний посторонними объектами. Структурированное освещение дает возможность минимизировать сложность изображения, но при этом максимизировать объем получаемой от изображения информации, которая затем передается на дальнейшую обработку. Подбор методов структурированного освещения осуществляется в зависимости от специфики освещаемых объектов. Для достаточно регулярных сглаженных объектов применяют диффузионное освещение (рис. П.31), т. е. освещение рассеянным светом, но с различных сторон - справа, слева, спереди, сверху. Совместная обработка теневых линий позволяет полу- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [ 157 ] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0015 |
||||||||