
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [ 158 ] [159] [160] [161] [162] [163] [164] [165] [166] I 71 Камера . Объект Тень "ШЬ- Источник 1Ень -Sn света Отражашщаг/ поверхность ГА/Тал Камера Рис. 11.31 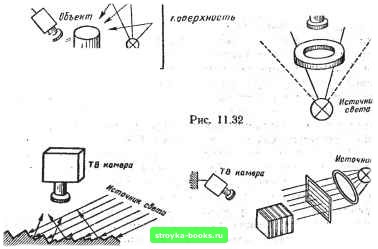 Рис. 11.33 Рис. 11.34 чить необходимую информацию об объекте по изображениям. Для контурных или силуэтных объектов эффективна задняя подсветка (рис. 11.32). Для негладких поверхностей полезным методом оказывается направленное освещение (рис. 11.33), которое усиливает и подчеркивает характер неровностей. В случае объектов сложной формы целесообразно применение модулированного освещения (рис. 11.34) с проекцией на объект световых пятен, полос, сеток и пр. Таким образом, предварительная обработка оптической информации с помощью структурированного освещения основана на управляемом изменений отражающих свойств объекта с целью усиления его восприятия системой очувствления. Представление образа - это следующий этап обработки визуальной информации, который позволяет преобразовать изображение в фсму, удобную для цифровой обработки, а затем кодировать изображение для дальнейшего распознавания. Представление образа в свою очередь можно разделить на два этапа: на первом обработке подвергается аналоговый сигнал, полученный по результатам восприятия изображения; на втором этапе проводится анализ сигналов, преобразованных в дискретный вид. Обработку изооражения в аналоговой форме часто также называют «препроцессингом», поскольку она предваряет дальнейшую цифровую обработку. Основой препроцессинга служит сегментация - процесс декомпозиции изображения на информативные составляющие. Сегментация, с одной стороны, как бы «обостряет» зрение визуальной системы и, с другой стороны, позволяет преобразовать в цифровую форму не все по-jie изображения, а только часть его точек. Обычно наиболее распространенные способы сегментации сводятся к использованию двух принципов: фиксации разрывов непрерывности и обнаружению схожести соседствующих точек изображения. Первый принцип реализуется в методах оконтуривания или выделения границ. При этом изображение дискретно сканируется специально формируемой маской. По разрывам изображения под маской вычисляются значения градиента, в результате чего от изображения сохраняются только контурные кривые в местах резких изменений интенсивностей и значений градиента. Дальнейшая обработка контурных изображений упрощается ввиду значительного сокращания объема вводимой в ЭВМ информации. Второй принцип - обнаружение схожести - реализуется в методах пороговой логики. Пусть (Xi, yD - координаты точек изображения с интен-сивностями С (х, у), где i = 1, 2, Л; - общее число точек. Пороговое изображение формируется с помощью сегментированной функции S (х, у) и пороговых значений интенсивности Л,,: Si(x, y)k, если ACiix, y)<iA+y, где fe = О, 1, 2, М - 1; М - число порогов яркости. В случае единственного порога яркости а имеем бинарную сегментацию 0, если С; {х, у)<.а; 1, если С; (л:, i/)>a. S{x, у): Если пороговое значение А, является только функцией интенсивности С (х, у), то такой порог называется глобальным и используется для сегментации хорошо отделимых от фона изображений. Глобальным порогом может быть монохроматическая интенсивность (например, изображения силуэтных объектов, получаемые задней подсветкой). Отличающийся цвет объекта также является глобальной пороговой характеристикой. Дальнейшие этапы обработки - распознавание образов, интерпретация сцены и синтез адаптивного управления - осуществляются в цифровой форме с помощью вычислительных устройств или ЭВМ. На этих этапах система, обучается отнесению объектов к разным классам, строится модель внешней сцены, координаты полученного образа преобразуются в команды коррекции исходной программной траектории робота. Теоретические аспекты распознавания образов и синтеза адаптивных законов управления подробно рассмотрены в предыдущих параграфах. W В заключение отметим, что адаптивное управление выполняет значительную роль в создании перспективных поколений робототехники, базирующихся на современных достижениях в области искусственного интеллекта. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [ 158 ] [159] [160] [161] [162] [163] [164] [165] [166] 0.0014 |