
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [ 159 ] [160] [161] [162] [163] [164] [165] [166] ЗАКЛЮЧЕНИЕ Теория автоматического управления непрерывно развивается. Разрабатываются новые подходы к решению традиционных задач, создаются новые направления в данной области науки. Если на начальной стадии создания теории автоматического управления, в 40-50-х годах нашего века, большее внимание уделялось частотным методам, то в дальнейшем в основном развивались методы, основанные на пространстве состояний. Интенсивное развитие теории автоматического управления тесно связано с быстрым развитием областей науки- и техники, в которых находят применение ее методы и принципы, со все большим распространением и расширением возможностей ЭВМ, с проникновением последних во все области управленческой деятельности. В настоящее время уже невозможно в одном учебнике в полной мере изложить все вопросы теории автоматического управления. Выбор материала при этом зависит как от назначения (программы учебного курса), так и от субъективной оценки авторами значимости тех или иных вопросов. В первой части настоящего учебника достаточно полно изложена теория линейных стационарных систем, большое место отведено исследованиям линейных стационарных систем с применением ЭВМ. Вопросы математического описания и исследования линейных нестационарных систем, затронутые в этой части, рассмотрены не столь полно. По этим вопросам имеются монографии, которыми при необходимости можно воспользоваться. Из-за ограниченности объема учебника сравнительно сжато изложены темы отдельных глав второй части. Так, например, несмотря на значительный объем гл. 10, посвященной теории оптимальных систем управления, в ней не нашли отражения численные методы решения задач оптимального управления, теория идентификации (методы математического описания систем по измерениям их входных и выходных переменных)-, хотя она важна и сравнительно хорошо развита. Читателям, которые желают углубить свои знания по тем или иным вопросам, можно рекомендовать обратиться к специальной литературе, в частности к той, список которой дан в настоящем издании. приложения Приложение 9.1 Таблица стандартных интегралов ,„.... . • где f(/«) = Oo (/«)"+Oi (/«)"- + ...+a,.: " • . gnt/«) = bo (/«)2<«-) +6i (/6))2<«- 2) + ... + и все корни f (/w) расположены в верхней полуплоскости. При я = 1 : При я = 2 При я = 3 /i=bo/2ao«i- /а = (-6о+ aoVaa)/2aoai. . Уз = (-Оао + aoi- аоа1б2/аз)/[2ав.((Сраз- ; -aiCa)]. • ; При я = 4 : J 1>„ ( - «1 «а + 02 «з) -«о «3 bi + Со «1 fca + («о з/«4) («о «з -«1 Og) * 2оо (ао al + af Oj -Oi as) При n 5 Jb = Д1б/2аоАб. Мб= fco (-Oo 04 05-f Oi al --o 05-«2 «3 04)4-00 bi (-a, Об+Оз 04)-+- + 002 (oo «6 - Oj O4) -f- Oo 3 (-Oo Оз + Oi «2 -f- (Oo 64/Ob) (-Oo fli «5 + + 0ос+ай4-OiOgOa), j Аб = Оо 05 -2«o Oi 04 Об-Oo 02 03 05 + ao а O4 + 0i of + Oj o og- ; - Oi «2 0304. - - : Приложение 9.2 Формулы и графики для определения статистических коэффициентов усиления некоторых типовых нелинейных элементов Типовой нелинейный элемент Формулы для статистических коэффициентов НЗеамнав релейная карактеристика «в \ VDy 1 {В при у>В; в при 1/<0 Сдиознвтая релейная карак/пе-риетина с заной нечувствительности
I а при у > 6; л = ( О при у< Ь. 1-8 при j/<-b 1 (i+m,) где mt=--mjj/b; ai=\/D/Ь Линейная характеристика с насыщением 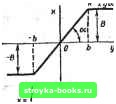 В при у>Ь: при -fl при у--Ь е 2 \ с, j - 1 Ц-т, \«j 1 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [ 159 ] [160] [161] [162] [163] [164] [165] [166] 0.0014 |
|||||||||||||||||||||||||||