
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] Будем полагать в дальнейшем, что при любом типе модулятора полярность выходных импульсов будет изменяться при изменении полярности модулирующего воздействия (рис. 8.2). Эти модуляторы, которые в литературе иногда называются двухтактными {двухполярными), наиболее удобны с точки зрения их применения в системах автоматического управления в отличие от однотактных {однополярных). Упомянутые выше виды модуляции принято подразделить на модуляцию 1-го и 2-го рода. Считается, что при модуляции 1-го рода модулируемые параметры импульсов определяются только значениями модулирующего сигнала в фиксированные дискретные моменты времени и не зависят от изменения сигнала между ними. При модуляции 2-го рода значения модулируемого параметра определяются модулирующим сигналом (или некоторым функционалом от него), определенным на конечном интервале времени (например, в течение времени действия импульса или в течение периода следования импульсов). На этом классификация систем с импульсной модуляцией в рамках настоящей главы ограничивается. Это связано с тем, что рассмотренные выше виды модуляции, как показывает практика, нашли наиболее широкое применение в различных системах автоматического управления; именно для данных систем в последующих параграфах будут описаны наиболее удобные инженерные методы исследования. Более полная классификация систем с импульсной модуляцией приведена в работах [1, 2]. Структурная схема амплитудно-импульсного модулятора. АИ-модулятор может быть представлен последовательным соединением идеального импульсного элемента (иногда он называется также простейшим импульсным элементом) и формирователя импульсов (рис. 8.3). В импульсном элементе осуществляется квантование входного сигнала х {t) по времени. Выходной сигнал импульсного элемента у {t) может быть представлен в виде последовательности дельта-функций, промоду- лированных дискретными значениями сигнала х, и определен соотношением Импульсный Формирода-злемент тель . y{t)=-2,x{iT)b{t--lT), (8.1) где Т - период работы (такт) импульсного элемента; I ~ \, 2..... формирователь импульсов преобразует промодулированные „б-импульсы в импульсы заданной формы. Для весьма распро-(Страненного случая, когда формируются импульсы прямоугольной формы (длительности у), передаточная функция формирова-.теля имеет вид W(s)=(l-e-)/s. (8.2) Если у < Т,т:о выражение (8.2) упрощается: 1Гф (S) « у. (8.3) Если у = Т, то V И7ф(5)=(1-е-»П/5. (8.4) Такой формирователь называется фиксатором нулевого порядка, он преобразует импульсный сигнал в ступенчатый Рис. 8.4 (рис. 8.4). Рассмотренный АИ-модулятор осуществляет АИМ 1-го рода (АИМ-1). Структурная схема частотно-импульсного модулятора. Частотно-импульсная модуляция (ЧИМ) предполагает изменение частоты следования импульсов в линейном соответствии с модулирующим воздействием. При этом частота следования импульсов понимается как мгновенная частота синусоидальных частотно-модулированных колебаний, у которых фазовые значения фп ~ Фо + 2яп, Фо = const, п = 1, 2,..., совпадают по времени с моментами tn появления импульсов [3]. ЧИМ достаточно удобно интерпретировать геометрически в комплексной плоскости, как это сделано в работе [4]. Модулируемый вектор (рис. 8.5) 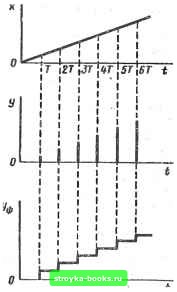 ы(/) = е/ч() (8.5) при отсутствии модулирующего воздействия х (f) вращается с постоянной скоростью Юо- 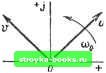 Воздействие х (t) линейно управляет скоростью изменения фазы вектора и: {t)/dt = щ + axit), (8.6) где «о = const; а - const. Так как рассматриваемая ЧИМ является однополярной, то скорость изме-Рис. 8.5 нения фазы вектора и не должна менять знак, т. е. должно выполняться условие iwo! > I ах {t)\. Зафиксируем в комплексной плоскости вектор V, совпадающий с положением модулируемого вектора и в момент начала модуляции и определенный с точностью до 2л . 1/(п) = еЯ<Р(») + 2"п]. (8.7) Тогда общая картина ЧИМ представляется следующим образом. Скорость изменения фазы модулируемого вектора и изменяется в линейном соответствии с внешним воздействием X (t) точно так же, как в случае непрерывной модуляции гармонического сигнала. Но в отличие от нее ЧИ-модулятор фиксирует положения модулируемого вектора и дискретно в моменты его совмещения с неподвижным вектором V (п), т. е. когда выполняется равенство и (tn) = V (п). (8.8) Таким образом, ЧИ-модулятор фиксирует моменты tn изменения фазовой функции ф (t) вектора и на величину 2л. Указанным моментам времени соответствуют моменты появления импульсов на выходе модулятора. Подставляя в уравнение (8.8) соотношения (8.5) - (8.7), получаем соотношение для определения шо„ + о f х(0 = 2яп+ф (д. (8.9) Из геометрической интерпретации ЧИМ и уравнения (8.9) вытекает структурная схема ЧИ-модулятора (рис. 8.6). Она представляет собой последовательное соединение интегрирующего звена, нелинейного элемента квантования прираи{ений (НЭ) и формирователя прямоугольных импульсов с передаточной функцией иф (s) = 1 - е-*. На вход схемы подаются два [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |