
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] сигнала: входное воздействие х (t) и некоторый постоянный сигнал Xq = aja. Величина кванта нелинейного элемента А = 2л/а. (8.10) (8.11) Таким образом, на выходе модулятора (рис. 8.6) получается последовательность прямоугольных импульсов длительностью у; амплитуда импульсов определяется величиной вертикальной ступени характеристики Н Э, а моменты их появления определяются уравнением (8.9). Выше рассмотрены уравнения и структурная схема одно-полярной ЧИМ, которая достаточно широко распространена в системах связи. Как указывалось выше, в системах автоматического управления удобнее двухполярная ЧИМ. Структурную схему для такого ЧИ-модулятора достаточно легко полу-чтъ,, используя схему однополярного ЧИ-модулятора. Действительно, если положить Хо = О и предположить, что полярность выходных импульсов определяется полярностью входного сигнала х, то уравнение (8.9) с учетом обозначения (8.11) можно привести к виду Здесь ср (4) = ф (4)/а. (8.12) Формирователь I- Рис. 8.7 Ha интервале одного периода импульсной последовательности tn - „-1 уравнение (8.12) запишется в виде ± J" х(ОЛ = ±А. (8.13) Структурная схема двухполярного ЧИ-модулятора, построенная согласно уравнению (8.13), приведена на рис. 8.7. В отличие от схемы рис. 8.6 в ней отсутствует сумматор, а нелинейный элемент квантования представлен гистерезисной характеристикой, у которой нижняя ветвь определяет формирование импульсов положительной полярности, а верхняя - отрицательной. Нелинейный элемент квантования приращений (рис. 8.8,а) обладает характеристикой, имеющей ряд общих моментов с характеристикой квантования по уровню. Принципиальное отличие состоит в том, что у характеристики квантования при- б) У
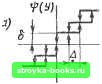 y-y(to) значения по У" н.э. г. и. Э-1. Формирователь Рис. 8.9 ращений оси абсцисс соответствуют не текущей величине входного сигнала у, а разности его со значением у (to) входного сигнала в момент to начала . преобразования. На рис. 8.8, б иллюстрируется во времени процесс преобразования сигнала у (t) нелинейным звеном. Выходная величина т)? (t) представляет собой ступенчатую функцию, моменты переключения которой совпадают с моментами определения переменного параметра импульсной последовательности. В настоящее время термин двухтактная или двухполярная ЧИМ практически не употребляется. Модуляция, определяемая уравнением (8.13), называется интегральной ЧИМ (ИЧИМ). Структурная схема широтно-импульсного модулятора. Для построения структурной схемы ШИ-модулятора удобно использовать геометрическую интерпретацию, примененную при построении структурной схемы ЧИ-модулятора. При ШИМ производится управление фазой вектора и (t) (см. рис. 8.5) в линейной зависимости от входного воздействия X (t). Таким образом, уравнения (8.5), (8.7), (8.8) дополняются при ШИМ уравнением вида (t) (Оо (t) + ах (t). (8.14) Решив совместно уравнения (8.5), (8.7), (8.8), (8.14) с учетом (8.11), получаем соотношение для определения момента t„ появления модулируемого фронта импульса: «6п+х(0=-Ап+ф(д. (8.15) где соб - частота следования импульсной последовательности. В соответствии с геометрической интерпретацией ШИМ и уравнением (8.15) структурная схема ШИ-модулятора построена на рис. 8.9. Она представляет собой последовательное соединение сумматора, на вход которого подаются сигналы х (t) и <о6 (t), нелинейного элемента квантования приращений (Н.Э1) и формирователя импульсов, который в данном случае выполнен в виде сумматора, на один вход которого подается сигнал с выхода НЭ1, а на другой-сигнал с аналогичного нелинейного элемента НЭ2 (рис. 8.9). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |