
|
|
|
Главная Нелинейные системы управления [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] вует фиксированное значение координат х („) и у (к), изоб-жаемое в осях х и г/ точкой. При изменении / изображающая точка перемещается по фазовой плоскости, прочерчивая на ней линию, называемую фазовой траекторией. Для каждого конкретного случая движения из начальной точки х (to), yitg) на исходящей из точки траектории можно отметить положения изображающей точки в моменты t, t,... (рис. 7.7) и таким об-. разом ввести переменную t в изображение движения. Но так как одной и той же точке х, у вообще могут соответствовать разные значения t на совокупности фазовых траекторий - фазовом портрете системы, дающем общее представление о характере движения, то такие отметки времени не делаются, хотя в отдельных частных примерах они могут быть полезными. Изображение всей совокупности возможных движений на фазовой плоскости часто ока.зывается весьма удобным благодаря наглядности. Наиболее распространен такой способ изображения, при котором используют две фазовые переменные: основную координату X и скорость ее изменения у = dx!dt. Величины X и у представляют фазы движения, что и послужило основанием введения термина «фазовая плоскость». В дальнейшем, если это не оговорено особо, мы будем пользоваться именно этими фазовыми переменными. Уравнения при этом будут dxidt = у; dyldt = f {х, у). (7.1 г) Поделив второе из уравнений (7.1 г) на первое, получим дифференциальное уравнение интегральной кривой на фазовой плоскости: dyldt f{x, y)ly. (7.2) Его решение дает уравнение кривых в конечной форме. Интегральная кривая или совпадает с фазовой траекторией, или состоит из нескольких фазовых траекторий в более сложном случае. Из (7.1 г) и (7.2) устанавливается ряд важных особенностей фазового портрета: 1. Если / (х, у) определены в некоторой открытой области R, непрерывны в этой области и имеют непрерывные частные производные по своим аргументам, то через всякую, точку Рис. 7.7 фазовой плоскости, за исключением
состояний равновесия (особых точек), в которых одновремен-ло = О и / (л:, «/) = О, проходит единственная интегральная кривая (теорема Коши). Это, в частности, означает, что фазовые траектории не пересекаются в неособых точках подобно силовым линиям магнитного спектра, что обеспечивает наглядность картины. Иногда приходится иметь дело с функциями f(x, у), не удовлетворяющими условиям Коши (разрывными, имеющими изломы, неоднозначными и т. п.). Тогда движение исследуют по участкам, на каждом из которых / (х, у) удовлетворяет условиям Коши. В тех случаях, когда / (х, у) неоднозначна и касательных к траекториям в одной точке может быть несколько, прибегают к изображению движения на многолистной плоскости так. что на каждом листе условия Коши удовлетворяются. 2. Так как при у = dx/dt >0 значение х только возрастает, то в верхней фазовой полуплоскости при возрастании t изображающая точка движется по фазовой траектории слева направо. Соответственно в нижней полуплоскости движение происходит справа налево. Направление движения на траекториях отмечают стрелками. 3. В точках у = О, f (х, у) Ф О, т. е. в неособых точках оси абсцисс, фазовые траектории пересекают ось абсцисс под прямым углом сверху вниз в правой и снизу вверх в левой полуплоскостях. 4. Значениям у О, f (х, у) = О, т., е. особым точкам на оси абсцисс, соответствует остановка движения. Решения уравнений f (х, у) = О, у = О дают значения абсцисс точек равновесия системы. Решение / (х, у) = О, которому соответствуют X = О, у = О, является тривиальным решением. В нелинейной системе в зависимости от вида функции / существует одно или множество решений, часть из которых могут быть устойчивыми, а часть - неустойчивыми, поэтому в общем случае нельзя говорить об устойчивости или неустойчивости нелинейной системы, можно говорить лишь об устойчивости или неустойчивости ее конкретных движений или состояний равновесия. Некоторые наиболее характерные виды фазовых траекторий, особых точек и других специфических линий рассматриваются ниже на конкретных примерах. Линейная консервативная система второго порядка. Уравнение свободных колебаний линейной системы, в которой нет 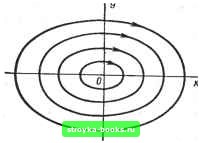 сил сопротивления движению, приводящих к рассеянию энергии, можно привести к виду (7.3) В механической системе наличие члена х, выражающего ускорение, обусловлено массой движущегося тела. Член соол; выражает позиционную силу, пропорциональную перемещению. Она обычно обусловлена пружиной. Обозначив dx/dt =у, dx/dt = dt dt, получим Рис. 7.8 dx/dt =x; dy/dt = -соо X. (7.4) Уравнение фазовой траектории dy/dx = - vtlx/y приводится к уравнению с разделяющимися переменными ydy Ч-+ (ooxdx и легко интегрируется в квадратурах г/2/2-f tog a;V2=CV2, (7.5) где произвольная постоянная С зависит от начальных условий: Уравнение (7.5) приводится к каноническому уравнению эллипса х/а + у/Ь = .1., полуоси а и b которого равны: а = = С/шо, b = С. Фазовые траектории, представляющие собой семейство вложенных друг в друга эллипсов с центром в начале координат, показаны на рис. 7.8. Движение по эллипсу соответствует незатухающему колебательному движению с угловой частотой ш, которое является решением уравнений (7.4) при начальных условиях X (0) = Хо, у (0) = Уо. т- е. л; = ~ sin Шо < Н- Хо cos «о -OoXosintOof -t- COS ©о- [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |