
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [ 39 ] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] получено из (8.87), если в нем ограничиться двумя слагаемыми наименьшей частоты: U7* (ую) » к ((/ю) -f W [/ (ю - 2я)] 1. Годограф на рис. 8.38 построе по точкам, соответствующим частотам оз = <0i, сй=<02 со = я. Очевидно, что все методы исследования устойчивости и качества, разработанные в § 8.2 для систем с АИМ, могут быть применимы для линеаризованной системы с ШИМ. Весьма удобным также для реЩения задач анализа и синтеза систем с ШИМ будет и метод логарифмических частотных характеристик, изложенный в § 8.3 применительно к цифровым системам и системам с АИМ. Исследование периодических колебаний в системах с широтно-импульсной модуляцией. Выше были рассмотрены вопросы исследования систем регулирования с ШИМ-1 по линеаризованной модели, т. е. при небольшой глубине модуляции. В общем случае система с ШИМ-1 является нелинейной системой и, следовательно, в ней возможны периодические колебания. Здесь мы проведем исследование симметричных периодических колебаний с помощью метода гармонического баланса. Структурная схема рассматриваемой системы с ШИМ приведена на рис. 8.37. Предположим, что модулируется задний фронт импульса. Тогда импульная последовательность на выходе модулятора может быть определена соотношением Z т 1 " "Р" nr<t< пТ+у [х (пТ)]; I О при + у [х (пТ)] <:t<:{n Н 1)7 Здесь, как и ранее, б - амплитуда; Т - такт следования импульсов; пи п -f 1 - моменты появления п-го и (п + 1)-го импульсов. Моменты появления импульсов будем называть тактовыми. Если тактовое значгние сигнала на входе модулятора превосходит некоторое пороговое значение 1/х, то соответствующий импульс будет заполнять весь интервал повторения. Такие импульсы будем называть насыш,енными. . Зависимость у [х {пТ)] = у [х (пТ)]/Т изображена на рис. 8.39. Аналитически она может быть выражена следующим образом: 11 при \х{пТ)1>(1/х).  и л(/7г; Рис. 8.39 Таким образом, при ]х (пТ) \ < длительность импульса пропорциональна модулю входного воздействия, а при больших значениях 1л: {пТ) длительность постоянна и равна интервалу повторения Т. Если теперь принять во внимание выводы §8.1 и соотношение (8.90), то широтно-импульсную систему (см. рис. 8.38) следует рассматривать как нелинейную, у которой нелинейность обусловлена, во-первых, модуляцией по длительности (квантованием) и, во-вторых, тем, что длительность импульсов является нелинейной функцией входного сигнала (рис. 8.39). Положим лго = О и предположим, что в рассматриваемой системе установились симметричные, колебания, при которых число положительных импульсов в периоде равно числу отрицательных и что период колебаний равен 2 NT, где N - целое число. Тогда сигнал х {t) будет представлять собой периодическую функцию с периодом, равным 2 NT (рис. 8.40, а). С выхода модулятора на линейную часть будет в этом случае поступать последовательность импульсов, длительности которых также меняются периодически с тем же периодом 2 NT (рис, 8.40, б). Эти длительности равны „, у, „, yw-i, о и определяются значениями х (0), х (Т),..., х [{N - 1) Т ] с помош,ью соотношения (8.90). Величины х (0), х(Т),..., x[(N - 1) П являются параметрами периодических колебаний, так как они полностью определяют периодическую последовательность импульсов на выходе модулятора, а следовательно, и выходную величину непрерывной части, которая является реакцией на эту последовательность. Последовательность импульсов, изображенную на рис. 8.40, б, можно разложить в ряд Фурье, т. е. 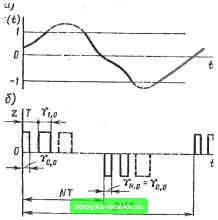 представить в виде суммы гармонических составляющих, причем коэффициенты этого разложения можно выразить через неизвестные параметры х (0), х (Г), xl{N - 1)Т] [11]: а„ sin {2т - 1) t + cos (2m - 1) t (8.91) (2m-l)n b, N- 1 1 - У cos (2m - I) (I + уо [X (iT)]) £ = 0 (2m - 1) П ctg(2m-I) w- 1 - 2 sin(2m-l)-(i-bYo[A:(tT)]) / = 0 (8.92) Обозначим частотную характеристику непрерывной части через W (/(о), а величины б и х учтем в приведенной непрерывной части. Тогда частотная характеристика приведенной непрерывной части IFnii (/w) запишется в виде Г„„ (/©) = 6><Г (/со) = Г„„ (со) еО <-). (8.93) Находя по известным правилам и складывая реакции непрерывной части на каждую гармоническую составляющую выражения (8.91), найдем выходную величину непрерывной части: (2т-1) к а„ sm + bm cos (2m-l)-i H-ef-ILZ±„] ЛТ \ NT I (8.94) Если в системе установились периодические колебания, то Л значений переменной х„ых (О в тактовые моменты времени t -О Т, 2Т, {N - I) Т должны быть равны N значениям сигнала [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [ 39 ] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |