
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 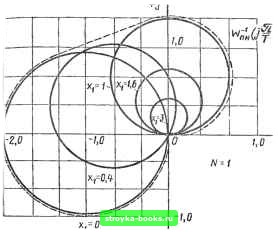 Рис. 8.41 Разобьем всю область возможных значений {ху, х) на две области, границей которых является прямая лг = 1. Рассмотрим область Xi<.l. Здесь колебания характеризуются тем, что импульсы в них являются ненасыщенными, при этом согласно формуле (8.90), в которой положено х = 1. соотношения (8.105) принимают вид а -= - (1 -cos nxi); sin ЛХх. (8.106) Рассмотрим область > 1. Здесь импульсы являются насыщенными, т. е. Yo (i) = 1 • При этом а = 4/л; = 0. (8.107) На комплексной плоскости Wm (уй>) (рис. 8.41) пунктирной линией ограничена область, в которую обращается правая полуплоскость плоскости (Xi, Xg) согласно формулам (8.104), (8.106), (8.107). Эта область заполнена семейством окружностей, соответствующих постоянным значениям х. Если точка частотной характеристики Wm (/«>) при оз = = зх/Т попадает в данную область, то в системе с 111ИМ-1 устанавливаются периодические колебания с 7V = 1. Меняя параметры системы или видоизменяя частотную характеристику за счет введения корректируюш,их устройств, можно вывести пнОш) Ь/Т) за пределы " «запретной» области и соот- ветственно устранить в реальной системе периодические колебания. Аналогичным образом можно построить области, соответствующие колебаниям = 2,3,... (см. [11]). В заключение подчеркнем, что если точка IF™ (/яУТ) при данном попадает внутрь «запретной» области, то при одном и том же N возможны различные периодические колебания (с различными параметрами), а также возможны как ненасыщенные, так и на-сыш,ениые колебания. «Запретные» области для насыщенных периодических колебаний при различных TV от I до 4 приведены на рис. 8.42. 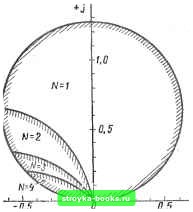 Рис. 8.42 § 8.5. Исследование систем с частотно-импульсной модуляцией- Системы с частотно-импульсной модуляцией, как было показано в § 8.1, являются существенно нелинейными, при этом такие системы (в отличие от систем с ШИМ) даже при малой глубине модуляции не могут быть линеаризованы. Вследствие этого к частотно-импульсным системам необходимо применять известные методы исследования нелинейных систем, учитывая, конечно, специфику частотно-импульсного модулятора (см. §8.1, рис. 8.6, 8.7). Отметим, что структурная схема модулятора, приведенная на рис. 8.7 и построенная по уравнению ИЧИМ (8.13), не является единственным вариантом структурного представления Ниже будут рассмотрены и другие структурные схемы. Применение тех или иных структурных схем, с одной стороны, обусловлено схемой реального модулятора, работающего в системе автоматического управления, а с другой стороны, удобством применения того или иного метода исследования. в настоящем параграфе будут рассмотрены в основном вопросы исследования систем управления с ИЧИМ-2, а также отдельные вопросы исследования систем с сигма-ЧИМ (S-ЧИМ), понятие которой будет введено ниже, и ИЧИМ-1. Исследование систем с ИЧИМ 2-го рода методом фазовой плоскости. Структурная схема системы управления с ИЧИМ 2-го рода приведена на рис. 8.43 (в дальнейшем будем исполь-зорать сокращенный термин ИЧИМ). Она состоит из модулятора и линейной части с передаточной функцией W (s). Модулятор (рис. 8.7) представляет собой последовательное соединение интегратора, нелинейного элемента (НЭ) квантования приращений и формирователя с передаточной функцией (1 - e-*v). Нелинейный элемент квантования приращений представляет собой кусочно-линейную характеристику (см. рис. 8.8, с), особенности которой рассмотрены в § 8.1. Так как на фазовой плоскости, как было показано в гл. 7, удобно исследовать нелинейные системы не выше второго порядка, то линейная часть (учитывая наличие интегратора в контуре системы) должна быть не выше первого порядка. Пусть W (S) = Ао /(1 + S Г„), (8.108) где ко. То - коэффициент передачи и постоянная времени соответственно. Фазовую плоскость рассмотрим в координатах у, х = dyldt, где у - сигнал на входе НЭ, а х - входной сигнал модулятора. ИЧИМ н.э. W(S) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [ 41 ] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |