
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [ 43 ] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] Частотно - импульсный модулятор "ШТ «оси Рис. 8.49 Соотношение параметров системы с ИЧИМ, при котором возможны периодические колебания (оно приводится без доказательства), имеет вид кфу > Д. (8.114) Пользуясь соотношением (8.114), можно выбрать параметры модулятора (б, Y, Д) или коэффициент передачи kg объекта управления, чтобы устранить периодические колебания в рассматриваемой системе с ИЧИМ. Исследование устойчивости в целом частотно-импульсных систем 2-го рода. Для исследования устойчивости в целом системы с ЧИМ 2-го рода удобнее воспользоваться структурной схемой, предложенной Я.З. Цыпкиным в работе [10]. Здесь эквивалентная ЧМ-модулятору схема представлена в виде релейной следящей системы, работающей в скользящем режиме (рис. 8.49). Линейный фильтр К (s) в случае ИЧИМ имеет передаточную функцию К (s) = kls, РЭ - релейный элемент, характеристика которого показана на рис. 8.50; /Coc(s) = и/г, где г= lim sK (s) - k. (8.115) Если в качестве фильтра К (s) использовать не интегратор, а апериодическое звено с передаточной функцией К (s) = kl (1 + sT,) и соответственно в качестве звена обратной связи - элемент с передаточной функцией Кос (*) = *о/. где, согласно (8.115), г =s к, /Tl, то получим так называемую сигма-ЧИМ (2-ЧИМ).
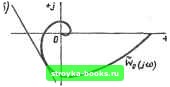
Рис. 8.90 Рис. 8.51 В соответствеии с предложенной структурной схемой частотно-импульсная система может рассматриваться как релейная система с внутренней обратной связью, предназначенной для создания скользящего режима (рис. 8.51). Здесь передаточная функция общей линейной части Wq (s) имеет вид: Wo(s) =: IW(s) + VH /C(s), (8.116) где W (s) - передаточная функция линейной части в частотно-импульсной системе. Таким образом, исследование частотно-импульсной системы (с ИЧИМ или Е-ЧИМ) сводится к исследованию релейной системы. В этом случае, используя известный критерий устойчивости релейных систем, можно сформулировать следующий критерий устойчивости частотно-импульсной системы [101: для того чтобы система с ЧИМ была устойчива в целом, достаточно, чтобы общая линейная часть эквивалентной релейной системы была устойчива или нейтральна, а частотная характеристика общей линейной части удовлетворяла условию Re (1 -Ь (5/и) U/o (М -- > 0. (8.117) Используем понятие модифицированной частотной характеристики Wf, (/о), где i/o(to) = (;o(o3)=RelFo(/to); Vo (w) =toVo (to) = CO Jm Wo (M- (8.118) Тогда критерий устойчивости в целом можно сформулировать так: частотно-импульсная система управления будет устойчива в целом, если модифицированная частотная характеристика общей линейной части эквивалентной релейной системы ле- 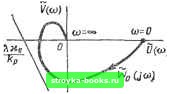 Рис. 8.52 жит справа от прямой Попова, проходящей через точки -Ык и имеющей неположительный наклон (рис. 8.52). Так как частотная характеристика общей линейной части получается из (8.116) при подстановке S = ju), т. е. 1Го(/о>) = [W(/«)-f>Co/rl/С(/о>), то характеристику Wo (/w) можно построить следующим образом (рис. 8.53): 1. Построим частотную характеристику линейной части W (/со) = и. (о) + jV (©) (кривая / на рис. 8.53, а). 2. Сместим ее вправо на величину к/г (кривая 2) и перемножим с частотной характеристикой К (/to) (для Е-ЧИМ кривая .5). 3. Таким образом найдена Wo (/о). Изменяя каждую ординату ее в to раз, получаем Wo (/©) (рис. 8.53, б). Проводя прямую Попова с неположительным наклоном, определяем конкретные параметры, при которых частотно-импульсная система устойчива в целом. Для ИЧИМ, где получаем Wo(/o) = (ir(/£o) + >co/rl-, Uo (о) - 1/ («))Jm W (/о>); (8.119) Vo (w) == - [ (/ (Ц + Ко/г] kr--liiV (to) - По- (8.120) Таким образом, для ИЧИМ Wo (/») можно построить непосредственно по действительной и мнимой частям W (/о).
 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [ 43 ] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |
|||||||||||||||||||||||||||||