
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [ 75 ] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] Случайные процессы на входе и выходе нелинейного элемента могут быть представлены следующим образом: У(/) = т,(0 + К(0; (9.172) X(t)=mAt)-h°X (t). (9.173) где my(t), tnx{t) - математические ожидания входного и выходного сигналов соответственно, включающие медленно меняющиеся регулярные составляющие; Y{t), X{t) - центрированные случайные составляющие процессов на входе и выходе нелинейного эле?к{еита соответственно. Заметим, что для четных нелинейных характеристик, обладающих выпрямляющими свойствами, математическое ожидание /Лзс(0 отлично от нуля даже при /п„(/) = 0. В общем случае для однозначной нелинейной функции 4>iy) произвольного вида сигнал на выходе эквивалентного линеаризованного элемента и (/) = Фо [ту) + kl Y (О =-т„ (О + Ь (t). (9.174) где Фо {гПу) - математическое ожида1П1е нелинейной функции фО/). fi - эквивалентный статистическнй коэффициент усиления по случайной центрированной составляющей. Таким образом, в общем случае нелинейный безынерционный элемент (рис. 9.25, а) заменяют двумя безынерционными элементами: нелинейным по математическому ожиданию и линейным по случайной центрированной составляющей (рис. 9.25. б). В частном случае, когда нелинейный безынерционный элемент имеет нечетную характеристику, функция фо может быть представлена в виде Ф„ = /го/п,(0, (9.175) где k„ - эквивалентный статистический коэффициент усиления нелинейного элемента по математическому ожиданию (гю средней составляющей). В этом случае нелинейный элемент можно эквивалентно заменить двумя линейными элементами с коэффициентами усиления kg и kl (рис. 9.26). Числовые значения этих коэффициентов при заданной нелинейной зависимости ф определяются значениями математического ожидания п дисперсии случайного сигнала иа входе нелинейного элемопта. Покажем сначала, как находят коэ1}х{)цциенты ф, k, ki в случае статистической линеаризации, основанной на первом EW-X(t)-UH) my(t) I nt) 1 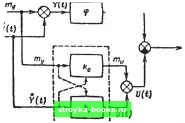 Рис. 9.25 Рис. 9.26 критерии статистической эквивалентности, состоящем в выполнении равенства математического ожидания и дисперсии случайного процесса на выходе нелинейного элемента и эквивалентного ему линейного элемента, т. е. когда /".(OHuW; (9.176) DAf)-DAt)- (9.177) Принимая во внимание (9.174), получаем Фо=/пЛО=/пЛО- (9.178) Для нечетных нелинейностей, учитывая (9.175), получим /г„=тЛО/т«(0. (9.179) Чтобы найти статистически эквивалентный коэффициент ку, перепишем (9.177) следующим образом: Dx (О = it) M\{U {т М l{k, Y т + k\ Dy it), откуда Л. = АГ = К Dx {l)/Dy (О = ±ах (D/Oy (О- (9.180) Обозначение /г" показывает, что коэффициент /г, найден по первому критерию эквивалентности. Статистические коэффициенты фо, kg и ftj можно также выразить через нелинейную зависимость ф и плотность вероятности w{y) случайного сигнала К(/) на входе нелинейного элемента: (9.181) 0 = =-- f 4>{y)w{y)dy; (9.182) my(t) my(t) J j 4>4y)w{y)dy -ml(t) VDy(t) . 9.183) Знаки в (9.180) и (9.183) следует выбирать такими, чтобы знаки X(t) и U{f) совпадали. Второй критерий статистической эквивалентности требует выполнения условия минимума математического ожидания квадрата разности процессов на выходе нелинейного элемента и эквивалентного линейного элемента, т. е. =ГМ [{X (О- и (t)Y] = min. (9.184) Подставляя в (9.184) значения X (t) и U{t), определяемые по (9.173) и (9.174), получим М [{т, (t) + X(О-Фо ~k,Y т = min. После выполнения операции возведения в квадрат и вычисления математического ожидания имеем - 2ф„т(0-2ftii?« (0)=:min, (9.185) где m{i) - математическое ожидание случайного процесса на выходе нелинейного элемента; Dy{t) = Ml{Y{t)}, DJt) = = М[{ХЩ)У\ - дисперсия центрированного случайного процесса на входе и выходе нелинейного элемента соответственно; х°у (0) = DOy (f) = MIX (О Y (f)] - математическое ожидание (среднее значение) произведения двух случайных функций X(rf) и Y{t), равное начальному значению взаимной корреляционной функции R°y(0). ?=«При заданных значениях т (t), Dy (t), D{t), R°y{0) величина является функцией параметров фо и ki. Значения фо и k, при которых выполняется (9.184), найдем, если приравняем нулю частньге производные функции по параметрам ф„ и k. Имеем dfldg = 2ф„ - 2т {t) = = О, откуда Фо = т,(0. (9.186) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [ 75 ] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |