
|
|
|
Главная Нелинейные системы управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 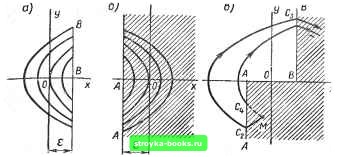 Рис. 7.31 кающееся в этой полосе, надо дополнительно указать, какому листу принадлежит начальная точка, т. е. кроме значений х„ и г/о в момент / = О указать также знак производной {dy/dt)o. Так, если точка М лежит на листе а {dyldt при == О положи-тельма), то движение пойдет по линии Мс, показанной пунктиром, поскольку она лежит на нижнем листе, и далее по траектории с, если же точка М принадлежит листу б, то движение пойдет по траектории МсР- § 7.5. Метод «припасовывания» граничных значений Метод «припасовывания», или «сшивания», граничных условий представляет собой точный метод определения процессов в кусочно-линейных системах. Для каждого из линейных интервалов выписывают решение уравнения, в которое входят неизвестные произвольные постоянные. Приравнивая те значения координат и их производных в конце предыдущего и начале последующего интервалов, которые не совершают скачков, находят произвольные постоянные. Проиллюстрируем метод «припасовывания» на примере нахождения параметров автоколебаний в системе с идеальным поляризованным реле с симметричной характеристикой (7 на рис. 7.6). Пусть линейная часть системы имеет передаточную функцию W {s) = Р (s)IQ (s), полюсы которой - простые, левые. Степень полинома Р ниже степени Q. Этим исключаются скач- -2 м
ки координаты х на стыках интервалов. Допустим, что автоколебания существуют и являются простейшими, однопериодными: интервалы включения реле в каждом направлении одинаковы (рис. 7.32).. На интервале / искомый процесс Рис. 7.32 0<(<.Г/2, где Sv - полюсы функции \ff (s); Со, Cv - произвольные постоянные; Т - пока неизвестный период автоколебаний; знак минус в формуле указывает на действие отрицательной обратной связи в замкнутой системе. На следующем интервале можно выделить две составляющие процесса. Для этого два последующих включения реле представим как наложение двух сдвинутых на Г/2 ступенчатых функций (рис. 7.32): М-1 (О и -2Л1-1 (-f 7-/2), где М - модуль выходной величины реле, известный из его характеристики. Первая слагающая вызывает продолжение процесса х\ на интервале : (Н-Г/2)= -С„- 2 Cv Sv«-l-T/2) Переменная ? теперь отсчитывается от начала интервала . Вторая ступенчатая функция вызывает реакцию, которую можно вычислить по формуле Хевисайда: X (О =2МР (0)/Q(0) + 2М У UlA Суммарный процесс на интервале ;c..(0=-CoiCve=v(+7/> v= 1 2МР (0) Q(0) + 2М 2 (7.24) Г, Sv«?(4) Но в силу симметрии характеристики реле, если однопериод-иые автоколебания существуют, Хи {t) будет равен Xi (f) с обратным знаком: Хи (t) =-х, {t). (7.25) Из (7.25) и (7.24) получим 2МР(0) " (3(0) СЛеЬ + 1)- е = 0. (7.26) Поскольку равенство (7.26) должно быть справедливым для любых значений t, приравниваем порознь нулю свободный член и множители при eV, v = I, п, тогда Со=Л1Р(0)/0(0), Cv= ---=-- [1 - th(sr/4)]. (7.27) Таким образом, все произвольные постоянные выражены через известные коэффициенты и полюсы передаточной функции и через неизвестный период автоколебаний Т. Для нахождения Т составим уравнение периодов, для чего используем условия переключения: на границах интервалов х проходит через нуль. Для конца интервала / Подставив Со и Cv из (7.27), получим уравнение периодов в виде MP ту 2MP(s)-" ИЛИ после несложных преобразований (0) + у l![l + th(5,7/4)1 = 0. Q(0) «(М [0] [1] [2] [3] [4] [5] [6] [7] [8] [ 9 ] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] 0.0013 |
|||||||||||||||||||||||||||||