
|
|
|
Главная Цепи и сигналы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [ 88 ] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] nrv-v-i e(t) -O-r- 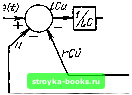 Интегратор Интегратор Рис. 8.51. Линейный четырехполюсник Рнс. 8.52. Структурная схема моделирования уравнения (8.109) уравнения системы результаты аналогового моделирования нетрудно затем преобразовать в алгоритм моделирования на цифровой ЭВМ. Моделирование дифференциального уравнения проиллюстрируем сначала на примере линейной цепи, показанной на рис. 8.51. Напряжение (в операторной форме) на выходе цепи \1Ср Lp4-r+\/Cp /.Cp2-f-rC/)-f 1 Перепишем это выражение в форме Е (р) = LCp и (р) + rCpU (р) -j-U(p). (8.107) Учитывая, что умножение U (р) на р эквивалентно дифференцированию и (t), а умножение на р эквивалентно двухкратному дифференцированию, приходим к следующему дифференциальному уравнению: e{t)LC d + rC + uit)LCu + rCu-u. dt dt (8.108) Решим это уравнение относительно наивысшей производной: ЬСи - е - гСи- (8.109) Уравнению (8.109) соответствует схема на рис. 8.52. Основными эле" ментами этой схемы являются интеграторы на операционных усилителях, сумматоры и умножители на число. Выходы интеграторов ими характеризуют состояние системы в рассматриваемый момент времени / с учетом начальных условий, т. е. состояния в момент времени о. а также с учетом действия входного сигнала на интервале от /„ до t. В этом смысле выходы интеграторов и и и называют переменными состояния, а основанный на них способ интегрирования дифференциальных уравнений называют методом переменных состояв и я (МПС). По существу, представленное на рис. 8.52 устройство, основанное на применении интеграторов, решает заданное дифференциальное уравнение (8.108) и определяет реакцию цепи (см. рис. 8.51) на воздействие е (t). Принцип построения схемы, описанный выше, можно применить и для моделирования нелинейной системы. В качестве иллюстрации построим 1 Этот метод получил особенно широкое распространение при анализе линейных систем со многими входами и выходами, когда эффективно применение матричного исчисления и векторного анализа для операций с большим числом переменных, входящих в исследуемые задачи [8]. В данном случае нас будет интересовать применение МПС к нелинейным задачам. (См. Деруссо П., Рой Р., Клоуз Ч. Пространство состояний в теории управления: Пер. с англ. - М.: Наука, 1970. схему, соответствующую нелинейному дифференциальному уравнению (8.81), которое запишем в форме (7 = - cos u>t --2aq~u)b q + bgq-. (8.110) Схема представлена на рис. 8.53. Дополнительно к двум интеграторам и сумматору потребовался функциональный блок, осуществляющий операцию возведения в куб функции q (t). Определение реакции нелинейных цепей на заданное воздействие решением дифференциального уравнения требует, как правило, больших вычислительных затрат. Задача упрощается, если рассматриваемая нелинейная система допускает дискретное представление процессов, происходящих в отдельных ее элементах, как линейных, так и нелинейных. Такое положение имеет место, в частности, если нелинейные элементы являются безынерционными. В подобных случаях открывается путь к эффективному цифровому моделированию. Покажем это на примере моделирования простого амплитудного детектора (см. рис. 8.24). Вольт-амперную характеристику диода представим в виде нелинейной функции д=/("д) = /(-"вых). (8.111) где "д = е - - напряжение, действующее на диоде. Соотношение между токами в линейной части схемы определяется выражениями 1«(0 + с(0=гд(0. hit)- откуда вытекает следующее нелинейное уравнение: ~ + "вых it)=f\e it) - «еых (01 Ul д С"яых=/(е-"ьых) - (8.112) Это уравнение моделируется аналоговой структурной схемой, представленной на рис. 8.54. На выходе сумматора 1 образуется разность е - «вых> которая после нелинейного преобразования в диоде дает ток /д, т. е. первое слагаемое в правой части (8.112). Нелинейное безынерционное преобразование (8.111) легко реализуется в ЭВМ. Функция / (Ujj) может быть задана либо в виде таблицы (например, по экспериментальным данным), либо аналитически. В первом случае таблица должна храниться в памяти ЭВМ, во втором случае вычисление значений 1д производится по программе, соответствующей аналитическому выражению. Переходя к дискретному моделированию, задаем шаг Т исходя из наивысшей частоты в спектре входного сигнала е (t), руководствуясь правилами, изложенными в § 2.17. Таким образом, входящие в уравнение (8.112) величины е (t).  Рис. 8.53. Структурная схема моделирования уравнения (8.112) "вых (О и 1д (О ДОЛЖНЫ быть заме-нены соответственно, на е (тТ), / - "вых (тТ) и (д (тГ). Для перехода от дифференци- ального уравнения (8.112) к эквивалентному ему разностному уравнению воспользуемся соответствием dusuxit) «вых («Л-«вых ("Т -л Интеаратор (8.113) Рис. 8.54. Структурная схема моделирования уравнения (8.112) которое имеет смысл при условии достаточной малости Т. Тогда уравнение (8.112) принимает вид -r ["вых (тТ)-иАтТ-Т)\ = /[е(тТ)-ив,(тТ)\- --г- «вых imT) "вых("1Т) = Rf\e{tnT)~UB,{tnT)] + вых(тГ-7), (8.114) Z+T где т = RC\ а„ = Т/ (х + Т); = х/ (х + Т). Уравнению (8.114) соответствует схема, представленная на рис. 8.55, а, а общая аналоговая схема (см. рис. 8.54) после перехода к дискретной обработке принимает вид, показанный на рис. 8.55, б. Из сопоставления аналоговой и дискретной схем следует,что звено с задержкой Т в кольце обратной связи для разностного уравнения аналогично интегратору для дифференциального уравнения. Характеристики и свойства подобных устройств обсуждаются в § 12.8. Моделирование рассматриваемой цепи целесообразно в тех случаях, когда аналитическое решение затруднительно или даже невозможно. Подобная ситуация имеет место, например, при детектировании относительно коротких радиоимпульсов, когда в пределах длительности импульса укладывается всего лишь несколько периодов высокочастотного заполнения и условие (8.56) оказывается невыполнимым (см. § 8.9). Пусть, например, средняя частота заполнения /о - 1/Го = 465 кГц (Промежуточная частота в обычно.м радиоприемнике), а длительность им- е(тТ)-иьь\-(тТ) иъыхСгпР) Рис. 8.55. Дискретный вариант схемы, представленной на рис. 8.54 1 Постоянная времени т= i?C, как правило, значительно больше периода высокочастотного заполнения входного сигнала е (i), так что спектр выходного напряжения «вых (О много же спектра сигнала е (t). Следовательно, при значении Г, обеспечивающем сохранение информации, которая содержится как в е (t), так и в / [е (t)], наверняка выполняется (8.113). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [ 88 ] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] 0.0014 |
|||||||||||||||||||