
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [ 16 ] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] №. It/a г-изображение оптимального управляющего воздействия на объект регулирования М (г) h== - BCp(G + F)~lB{C + D) + + 2CDVBcosU] GF\ be = BCDGF; Я=Ка -b"/4; В=.е- C=e~h De-"; Ge; Fef s8(s2 + 6s + a)(s + + c)(s + d)(s + g) при 4a - b>Q /Co(l+fe,2-i + V 4- bz~* -u где Ко acdg аЛ2(1 2l/~ficosM+ + fi)(l -C)(l-D)(l-G) bj = - (1 + 2 Kb cos M+C+D+G); 62 = B + C£> + G + 2KB(C + D) X X cosU + (2"KBcosXft + C + D) x X (1 + C); feg = - В (C + D) - 2CD Kb cos ЯА-- [В + 2 Kb (C + D) cos Яй + CO]x X (1 + G) - (2 Kb cos ЯА + C+D) G; bi = BCD + [B(C + D) + 2COKb X XcosU] (1 +G)+IB + 2KB(C + + cos ЯЙ +CD] G; 65 = -BCD(l + G)-[B(C + D) + + 2CD Kb cos ЯА]С; bo = BCDG; X = Ya~ ЬУ4: B=e С = е-; D = е-"; G = e" 58(s2 + bs + a)(s + + c)(s + d) при 4a -Ь2>0 /Со (1 + + M"+ + где Ко ah» (1-~2V В cos %h+ + BH1-C){1-D) 6= (2+2КВсо8ЯА + С + 0); 62=1+B + 2C + 2D + CD + + 2KB(2 + C + D)cos ЯА; 6, = - (1 + B) (C + D) - 2B-2CD- -12KB(1+2C + 2D+CD) cos ЯА; = В + CD + BCD + 2 ВС + 2BD+ + 2Kb (C + D + CD) cos ЯА;
В табл. 1.2 приведены 2-изображения оптимальных управляющих воздействий М (2) = 5] «2 (vft+) 2- = 5] mz- V=0 V»»0 г 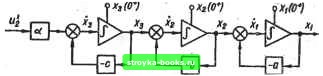
Рис. 1.11 на линейные объекты регулирования в системах (рис. 1.1, а) при единичном ступенчатом воздействии на входе систем и нулевых начальных условиях. Поскольку в процессе определения оптимальных управляющих воздействий находятся все переменные состоявия объекта, то по выходным переменным (vA*) можно найти входную последовательность «г (vft*) для цифрового регулятора и определить передаточную функцию W (г) цифрового регулятора. Рассмотрим объект регулирования, математическая модель которого описывается передаточной функцией вида О (s) == = а I(s + а) (s + b) (s + c)l~i. Схема аналогового моделирования для объекта регулирования изображена на рис. 1.11, а. Этсгг объект имеет астатизм нулевого порядка. Записывая уравнения динамики объекта регулирования в векторно-матрнчной форме -о = Av, где Г -а 1 ( Д = 0-610 , • О О -с а -ООО
определяем расширенную дискретную матрицу перехода для объекта регулирования А N М aL О В W аР О О С «<? L0 О О I . где f Ф(Л) = bhcB-bC) (1.42) A В С -(b - a)(c - a) + (a - b)(c - b) + (a - c){b - c) bcA acB abC {b - «)(c -a)~ (a - b)(c - b)~ {a - c){b - c). Обозначим u\ (vA+) «= m., н последовательно найдем г>(0+)=[0: 0; 0; «о]: г» (й+) = \a,Ltno\ аРшо", aQnto; mj; "af i«Jo 4- «Z,mi V (2A*) г> (ЗЛ+) = где FiAL + PN + QM; F = BP + QW; + MCQ; Sg = 8 + WCQ. аРШо 4- w/wi aQCm 4- osQmi ma aSjiTJo 4- аРхЩ + aLmg aSig 4~ aPgrni 4~ 9<2 (C«mo 4- Cmi 4- mj) = f,+iVFg4- Чтобы переходные процессы в объекте регулирования при нулевых начальных условиях заканчивались за время, равное 3ft, необходимо равенство вектора г» (3ft+) вектору (при U = I) 1; а; аЬ; abc а [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [ 16 ] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
|||||||||||||||||||||||||||