
|
|
|
Главная Система автоматического управления [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Передаточная функция W {г) цифрового регулятора 2 «,(vftT«~ ЦитрсШ •v=0 (i.2)
tluippoScu регулятор Чшсатор СШып H(s) u(t) e(i) Цифровой рееувтер Фиусвтор одъект Рис. 1.1 Для получения максимального быстродействия при входном воздействии типа ступенчатой функвди и нулевых начальных условиях необходимо, чтобы при О Nh, где N - порядок дифференциального уравнения объекта регулирования; h - шаг квантования мгновенного ключа, ошибка системы равнялась нулю, и входные сигналы интеграторов схемы системы в перемен- ных состояния также были равны пулю. Используя метод переменного коэффициента усиления, можно для различных передаточных функций G (s) линейных объектов регулирования получить аналитические выражения для коэффициентов передаточной функции W (z) цифрового регулятора (рис. 1.1, а) [19; 23]. Передаточные функции W (г) цифровых регуляторов, обеспечивающих при входном воздействии типа ступенчатой функции 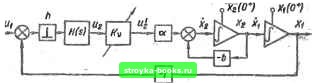 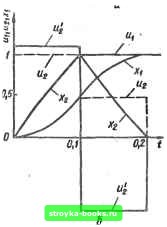 Рис. 1.2 и нулевых начальных условиях оптимальный переходной процесс, различные в зависимости от того, имеет объект регулирования интегрирующие звенья или нет. Определим передаточную функцию W (г) оптимального цифрового регулятора для системы, имеющей объект регулирования с передаточной функцией G (s)-- а [5 (s-j-fe)]". Объект регулирования имеет астатизм 1-го порядка. Схема аналогового моделирования для такого объекта изображена на рис. 1.2, «. Дрффе-ренциальные уравнения состояния (без учета переменного коэф-фициентя усиления /С) имеют вид =0; = х; *2 = - bxg- - auji «2 = 0; уравнения переходных состояний: «j (vft+) = Uiivh); Д"! (\h+) = Xi (vft); (vft+) = x (\h); (vft+) = Ui (vft) - Xi (vft). Переписывая уравнения в векторiio-матричной форме v = Av н V (\h = Bv (vft), находим
с учетом усилителя, с переменным коэффициентом усиления определим дискретную матрицу перехода по матрице А в виде: 100 о о 1 Q aPKv 00 В aQKv ООО 1 ; Q = y (1-В); Р=(6Л-1+В). (1.3) Далее на основании соогношення (1.1) последовательно вы-числяем г>-(0+) = (В»{0)) = [1; 0; 0: 1]; (й) = (Ф (й. Ко) V (0+)) = [1: аРКо-, o.QK„; 1]; ф-(й+) = (Bv(h)f = 11; аРКо. aQKo-, 1-аРК„]; аРКо + aQo+O - ccPio) «"1 aQBK„ + aQ(l-aPKo)Ki 1 - аРКо Последнее выражение показывает, что в конечное состояние равновесия систему можно перевести за два периода прерывания мгновенного ключа. Для этого необходимо совместное выполнение вух условий: XI (2/1) = а (Р + Q2) аР (1 - аРКо) Ki=l; xt (2ft) = aQBKo + aQ (1 - aPK„) Ki = 0. Из условий (1.4), используя выражения (1.3), записываем a{P-\-Q-BP] ah{l -В) 1 - аР/<о а[1~£(1 +bh)]- (1.4) (1.5) Определим передаточную функцию цифрового регулятора на основании выражения (1.2) W (г) = Каи(0*)+КуЩ т г- M,(0+) + M2(ft)2-i где И2(0+)=1; Oj = (ft+) = 1 - аР/Со = I - Д (1 + bft). > bh (1 - В) Ь, = «2 (ft") = - JB: в = е-*". Из выражений (1,5) и (1.6) видно, что коэ(}х})ициенты передаточной функции цифрового регулятора можно определить непосредственно через параметры передаточной функции объекта регулирования и шаг квантования й. Оптимальный цифровой регулятор (при единичном ступенчатом воздействии на входе системы) формирует следующие управляющие воздействия на входе объекта регулирования: /По = н2 (0+) = Ко; nil = «2 Ф*) = <1«2 (h+) = - ВКо- Переход- [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
||||||||||||||||||||||||||||||||||||||||||||||||||||