
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [ 23 ] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] где Р (t) = - fftT - 1 + В (т)1; Q (т) = 1 [1 - В (т)]; В (т:)=е Переходные процессы в интервале 0+ <: т < й, ft+ < < 2Л, i = T-{-h, определяются вектором "а [Р + QQ (т)] /По + аР (т) пц B(T)= a,QB(x)mo + aQ{T:)mi L «1 (1.80) Пусть объект регулирования в системе на рис. 1.2, а имеет параметры а = 10 с~"; b = 2 с . На вход системы поступает входное воздействие и (/) = 1 + 2/, т. е. U - I, а - 2 с~К Определим передаточную функцию оптимального цифрового регулятора при шаге квантования /г = 0,1 с. По формулам (1.76)-(1.78) 14,3066 - 23,8131 г-1 + 9,906б2-« W(z) (1 - г-1)(1 4-0.53012-1) -loL
. Переходные процессы в системе на рис. 1.2, а, рассчитанные при заданных параметрах объекта регулирования и цифрового регулятора по формулам (1.79) - (1.80), показаны иа рис. 1.15. Определим передаточную функцию W (г) оптимального цифрового регулятора для системы на рис. 1.1, я с объектом регулирования, математическая модель которого описывается передаточной функцией G (s) = aJs\ при поступлении на вход системы воздействия « (f) - U а/. Эта передаточная функция имеет вид Ьп + 6i2-i 1 и h °t = t~ + To- t; 3 и где 6о = 2 + 1 = Переходные процессы в интервале 0+ < т < ft, / = т, определяются вектором г.(т): , Переходные процессы в интервале 0+ < т < ft, Л+ < / < 2/i. / = T4-ft, определяются вектором Пусть объект регулирования имеет параметр а = 10 с- На вход,системы (см. рис. 1.1, а) поступает входное воздействие и (t) - 1 + 2/, т. е. и - 1, о = 2 с Определим передаточную функцию оптимального цифрового регулятоза при шаге квантования й = 0,1 с ио формуле (1.81) где Ьо = 10 + 1.5о; Ь = -10 - 0,5а; = 0,5 + 0,025а. 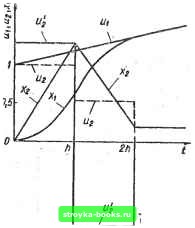 Рис. 1.16 Переходные процессы в системе на рис. 1.1, а, рассчитанные при заданных параметрах объекта регулирования и цифрового регулятора, показаны на рис. 1.16. Передаточная функция W (г) оптимального цифрового регулятора для системы на рис. 1.1, а с объектом регулирования, математическая модель которого описывается передаточной функцией G (s) = a/s, при поступлении на вход системы воздействия u{f) == и + ot имеет вид 6л = и afts + 2ft и (1.82) U J fli =-g-+-3-a; aj =-g-+-g a. Переходные процессы в интервале 0+<T<;ft, t = i определяются вектором (1.83) (1.84) Переходные процессы в интервале 0+<!T<ift, A*<!<<2/i, f = т -f- /J. определяются вектором «(1)= --а/126о4-аЛт6о + 4-«г1 a/i6o 4- arfcj Переходные процессы в интервале 0*<:T<:ft, 2/i+<j<!3ft, < = т 4" 2/г определяются вектором - сЛЧо 4- o/xSfti 4-1- оЛЧбо 4- у СсЛЧб! 4- 4- сЛтбо 4- - аЛтб 4- ата 3 1 1 Y oth4o 4- -g- аЛг»! 4- ahibf, 4- аЛтб 4-ахЧ ahbf, 4- aftbj 4- атб, Пусть объект регулирования имеет параметр а = 100 с". На вход системы (см. рис. 1.1, а) поступает входное воздействие « (О = I + 21, т. е. и = 1, о = 2 с-1. Определим передаточную функцию оптимального цифрового регулятора при шаге квантования ft = 0,1 G по формуле (1.82) 4-26г-14-12г 5 1 где йо=104-2(т; 6i=-20 -Зо; 62=104-0; ai=- + ja; г.(г): .(1.85) . Т + бо"- Переходные процессы в системе на рис. 1.1, а, рассчитанные при заданных параметрах объекта регулирования и цифрового регулятора по формулам (1.83) - (1.85), показаны иа рис. 1,17. Рассмотрим систему на рис. 1.1, а, в которой математическая модель объекта регулирования описывается передаточной функцией С (s) = а [s {s 4- я) (s 4-6)1 Схема аналогового моделирования для объекта изображена на рис. 1.6, а. Дискретная матрица перехода для объекта имеет вид ~1МР aL" OA WaP 0 0 В aQ 00 О 1 где элементы матрицы определяются выражениями (1.9), (1.21). Оптимальные переходные процессы в системе на рис. 1.1, а с таким объектом регулирования при ступенчатом входном воздействии исследованы ранее (см. формулы (1.21) - (1.26), (1.40), (1.41)). Некоторые результаты этих исследований используем ниже. 0(ft): [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [ 23 ] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0009 |