
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] При поступлении на вход системы на рис. 1.1, а о рассматриваемым объектом регулирования линейно изменяющегося воздействия и (t) = и + oi при нулевых начальных условиях можно организовать переходный процесс без перерегулирования выходной координаты за минимальное время, равное ЗА, если выполнить совместно три условия; Хх (ЗА) =a(L + MP + PQ + AMP + MWQ + BQP) ntg + + all+ PM + QP) mi + aLm = i/ -f ЗЛа;-(ЗА) = a (AP + AWQ + BWQ)mo + a (AP + QW)mi+ (1.86) aP«2 = a; лгд (ЗА) = aQ {Bm„ -f Bmi + /wj = aa. 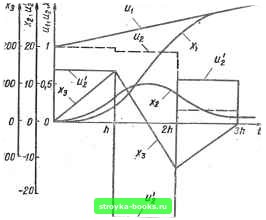 Рис. 1.17 Записанные уравнения отличаются от уравнений (1.40) правыми частями, что приводит к более сложным математическим выкладкам при решении системы уравнений (1.86). Умножая второе уравнение на q, а третье уравнение на Р и вычитаяиз второго уравнения третье, после несложных преобразований находим следующее соотношение; Q - aP mi = -(Л + В) то + aQ(AP + QW=W) °- Используя выражения (1.9) и (1.21) для элементов дискретной матрицы перехода Ф (А), получаем mi = -(Л + В)то + 7А)(Г~)0- (»-87) Умножая второе уравнение на BQ, а третье уравнение - на (АР -f- QW) и вычитая из второго уравнения третье, после несложных преобразований имеем а(АР + QW) - BQ т = АВто + fjp .. qr/ ВР) °- Используя выражения для элементов дискретной матрицы перехода Ф (А), определяем ab(l -A~B) Подставляя значения nii и «а из формул (1.87) и (1.88) в первое уравнение системы уравнений (1.86) и используя выражения для элементов дискретной матрицы перехода Ф (ft), решаем это уравнение относительно неизвестного ah О- -А){\ - В) h a + b\ Л -Т=В+~5Г] ° • \ - А (1.89) Подставляя выражение для величины в формулы (1.87) и (1.88), находим ab (А -f В) ah{\-A)(\-B) ft A~\-B ~ A + B ab AB Г /о. A A A. -aft(l-A)(I-B) [t + \3ft- B+ AB- . ft ft a + b\ ~l-A-l-B+ ab }° (1.90) (1.91) В установившемся режиме . ..• m = ~(j при v>3. (1.92) Таким образом, оптимальный цифровой регулятор при линейно изменяющемся входном воздействии должен формировать управляющие воздействия на входе объекта регулирования в переходном режиме «о = "а Ф*У> т1=щ (h*); «а = "а (2*). которые определяются выражениями (1.89) - (1.91), и в установившемся режиме - управляющие воздействия, которые определяются выражением (1.92) и образуют постоянную величину на входе объекта. Найдем последовательность импульсов на входе цифрового регулятора: «а (ft*) = f/ + fto - xi (ft+) = U +ha - aLnio +ha - X bA - aB abh~(,a + b)+ J (2ft+) = t; + 2ft(j - % (2ft*) = {/ + 2fto - d [(L + + PQ + Lm,J = t; + 2fto-{ a6ft + 6M(1 - Л) -o2B(I -B) a - b aB - 6M7 + [aftft-(a + ft)+ J (1.93) (1.94) Передаточная функция оптимального цифрового регулятора w м - «о + тг"! + mz- + т, (г"» + г + ... + г" + .. .) - (1-Z-1) (t; + Oiz-i + az-) l-9> где bo = m; bmi- moi bm- m,; = -«г! = «гС*): fl2==«2(2ft+). Определим переходные процессы в системе на рис. 1.1, о с рассмотренным объектом регулирования и оптимальным цифровым регулятором, обеспечивающим минимальное время регулирования, равное 3/г, без перерегулирования выходной координаты X (f) при линейно-изменяющемся входном воздействии « (О = и + of. Переходные процессы в интервале О* < < < ft, / = т, определяются вектором v (т) = [xi, х; Xg-, т] = [aL (т) Шо; аР (т) Шо, aQ(x)mo: Шо], (1.96) где L(T)= ЬА (т) - аВ (т) абт -(й + &) + ЬЫ (т) - аВ (т) /(x) = ix 1-f- , (1.97) a-b J Q()=tH-B(T)]; A(r) = e--B{%) = e-. Переходные процессы в интервале h* 2h, 0+ < т < ft, / = T -f- A, определяются вектором г a [L + PjM (T) + QP (т)] Шо + aZ, (т) т а ГРЛ (г) + QW (т)\ то + аР (т) т aQB (T)mo + aQ(T)mi mi где Ж (т) = [1 - Л (т)]; W (т) = [В (т) - Л (т)}. Переходные процессы в интервале 2ft+ <: Г<: 3ft, 0+ <: т <: ft = т + 2ft, определяются вектором а (L + РЛ-г + QP) то + aLm + а [(ЛР -f" + Q то + Pmi\ М (т) + а {BQmo + + Qmi)P(T) + aL(T)/n, ф (т) = а [(ЛР + Q W) то 4- Рт] Л (т) + . (1.98) -f а (BQmo + Qx) (т) + « (т) а (BQmo + Qi) В (х) + aQ (т) т Рассмотрим пример. Пусть параметры объекта регулирования а = 800 с~; b - 2 с-1; а = 20 С. На вход системы на ркс. 1.1, а поступает воздействие и {() - U +о<, где U = \, о = 2 с-1. Определим передаточную функцию оптимального цифрового регулятора при шаге квантования ft = 0,1 с по формулам (1.89) - (1.95): 4,35559 - 7,87309г-1 + 4,029432" - 0,41193г-8 (1 2-1) (I + 0,842972-1 + 0,10292г-2) " Оптимальный цифровой регулятор формирует на выходе Б переходном режиме последовательность мгновенных импульсов, [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [ 24 ] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |