
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] площади которых соответственно равны Шо-т (О*); /и = = т (ft*V, гпц - т (2ft*), и в установившемся режиме - бесконечную последовательность мгновенных импульсов, площади которых равны т= т (vft*) при v :> 3. На входе объекта регулирования (после фиксатора нулевого порядка) цифровой регулятор формирует управляющие воздействия в виде импульсов длительностью ft, амплитуды которых равны то = «2 (0+); «1 =«2(ft*); щ = tij,2h*) и = (/ (vft+) при v > 3. Для заданных параметров объекта регулирования и шага квантования получаем следуюидае значения: = 3,190056 + 0,58277а; = -3,043526 - 0,23699о} №2 = 0,353476 +0,07923а; т., = 0,05о. где {/= 1 и а=2с-1. Переходные процессы в системе на рис. 1.1, а с указанным объектом регулирования и оптимальным цифровым регулятором при входном воздействии «-( = 1 + 2 и нулевых начальных условиях, рассчитанные по формулам (1.96) - (1.98), изображены на рис. 1.18. Рассмотрим систему на рис. 1.1, и, в которой математическая модель объекта регулирования описывается передаточной функцией G (s) = а [s (s + ft)]-i. Объект регулирования имеет астатизм 2-го порядка. Схема аналогового моделирования для объекта изображена на рис. 1.7, а. Дискретная матрица перехода для объекта имеет вид 1 ft Р aL 0(ft) = О 1 Q аР О 1 BaQ ООО I где элементы матрицы определяются выражениями (1.3) и (1.27). При поступлении на вход системы (см. рис. 1.1, а) с рассматриваемым объектом регулирования линейно изменяющегося воздействия u(j)- и + at при нулевых начальных условиях можно организовать переходной процесс без перерегулирования выходной координаты за минимальное время, равное 3ft, если выполнить совместно три условия: xi (3h) = а(L + 2АР + QP + ftQ + BPQ) + a (L + ftP + + QP) nil + aLmg = t; + 3fta; x (3ft) = a (P + Q2 + BQ2) mo + a (P + Q) + aPm = a; ,(3A)=a-- - (1.99) Хз (ЗА) = aQ (ВШо + Вт + mg) = 0. Умножая второе уравнение на Q, а третье уравнение - на Р и вычитая из второго уравнения третье, после несложных преобразований находим следующее соотношение:- Щ = -(1 + В) то + а (Р + Q2 BP) °- Используя выражения для элементов дискретной матрицы перехода Ф ф), получаем Шх = -(Г + Б)то + В) (l-lOO) Умножая второе уравнение на BQ, а третье уравнение - на (Р + Q) и вычитая из второго уравнения третье, после несложных преобразований имеем == Вшд - Q2 щ о. Используя выражения для элементов дискретно{5 матрицы перехода Ф (А), получаем Подставляя значения т± и из формул (1.100) и (1.101) в первое уравнение системы уравнений (1.99) и используя выражения для элементов дискретной матрицы перехода Ф (h), решаем это уравнение относительно неизвестного /Яо: ah (1 - В) .102) 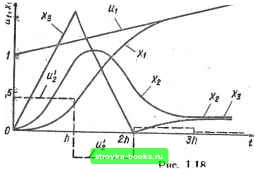 Подставляя выражение для величины Шо в формулы (1.100) н (1.101), находим Г / 1 А «1 = -аАМ1 А А \ ""2 -ГГв/" - ahX ~ В) ( 1 А ЗА\ 1/ + ЗА + у-узв- (1.103) (1.104) Таким образом, оптимальный цифровой регулятор при линейно изменяющемся воздействии и (i) == U -{- at на входе системы рис. 1.1, а должен формировать управляющие воздействия на входе объекта регулирования в виде импульсов длительностью А с амплитудами гпд = (0+); ~ щ (А+) и = = u(2h*), которые определяются выражениями (1.102) - (1.104). Определим площади 0 (vA*) мгновенных импульсов на входе цифрового регулятора в системе на рис. 1.1, а (амплитуды «2 (vA+) сомкнутых между собой импульсов на входе усилителя с переменным коэффициентом усиления в эквивалентной системе на рис. 1.1, б): е (О*) = «2 (0+) = и ~xt (0+) = U; е (А+) = «2 (А+) = U-{-ho - Xi (А+) = и + ho - ~aLmfi = U-{.ha - Ts bh + l в)/По; (1.105) 0(2ft+) = «2(2Л+) = U +2ha-xi (2A+) =.U+2ha - ~a(L + hP + QP) mo - aLmt = U + 2ha- (1.106) - 26S {(Sfeft" - 2 (6ft - В + B)] Щ + 2 (fcft - 1 + B)] rtii). Передаточная функция оптимального цифрового регулятора где 60 = 0; l>i = mi, b = m, = (ft+); == «2 (2ft+). Определим переходные процессы в системе на jdhc. 1.1, а с рассмотренным объектом регулирования и оптимальным цифровым регулятором, обеспечивающим минимальное время регулирования, равное 3ft, без перерегулирования выходной координаты X (О при линейно изменяющемся входном воздействии и ( == и + at. Переходные процессы в интервале О* f < ft, t = х, определяются вектором •0 (т) = [xi; ДС2; лгз; т] = [aL (т) Шо, аР (т) aQ (т)то; «о!. (1-108) где Z. (т) = 4 - Ьх+1-В(х) Р(т) = -[6А-1 + В(т)]; v(x) (1.109) г.(т) = (1.110) Q(t)=-[1-B(t)}; В(т): Переходные процессы в интервале ft* < f< 2ft, 0+<:т< ft, #=T-j-ft, определяются вектором -а L + xP + QP (т)] «о + (т) «11 а Р + QQ (т)] Шо + аР (т) aQB (т) т„ + aQ (т) Mi mi Переходные процессы в интервале 2ft+<: f< 3ft, 0+<:T<ft. <=t + 2ft, определяются вектором - a [ L+ftP+QP+(P+Q2) t+BQP (т)] пц+" + a [L + тР + QP (x)] mi + aZ, (т) a[P + q + BQQ (t)]mo + a[P + + QQ (t)] mi + aPma a [QBB (t) mo + QB (т) mi + Q (т) ma] Щ Рассмотрим пример. Пусть параметры объекта регулирования а = 800 с~; 6=2 c"i. На вход системы (см. рис. 1.1, а) поступает воздействие « (Q = t/ + о/, где U - \, о = 2 с i. Определим передаточную функцию оптимального цифрового регулятора при шаге квантования ft = 0,1 с по формулам (1.102) - (1.107) 1,92624 - 3,22747г-1+ 1,35124г-2 V/{z,~ 1 о,95513г-1+ 0,189552-2 • Оптимальный цифровой регулятор формирует, иа своем выходе три мгновенных импульса, площади которых соответственно равны Wo = (О*), mi = m (ft+), т = т. (2ft*). На входе объекта регулирования (после фиксатора нулевого порядка) цифровой регулятор формирует управляющее воздействие в виде импульсов длительностью А каждый с амплитудами /Пд = «2 (О*)» ~ [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0009 |