
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] гоо too -too V7,S-US\ .-2,51 7" Рис. 1.19 }Хф*) 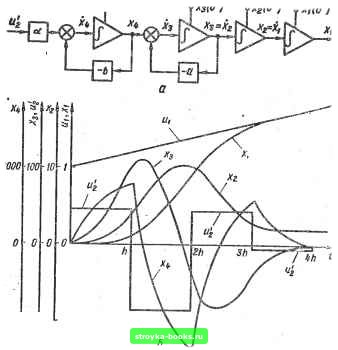 -тоЧооио Рис. 1.20 = «2 (A+), 1712 = ul (2/г*). Для заданных параметров объекта регу» лирования и шага квантования получаем следующие значения: «о = 1.37916[/ + 0,27354а; mj, = -2,50833[/ - 0,35957а; т, = == 1,12916[/+0,11104а, где £/ = 1, а = 2 сК Переходные процессы в системе иа рис. 1.1, а с указанным объектом регулирования и оптимальным цифровым регулятором при входном воздействии и (t) = 1 + 2< и нулевых начальных условиях, рассчитанные по формулам (1.108) - (1.110), изображены на рис. 1.19. Рассмотрим систему на рис. 1.1, ас объектом регулирования четвертого порядка, математическая модель которого описывается передаточной функцией G (s) = а [s (s+ а) (s + Ъ)]~. Объект регулирования имеет астатизм второго порядка. Схема аналогового моделирования для объекта изображена на рис. J.20, с. Дискретная матрица перехода для объекта имеет вид г1 hS L ccGn О 1 Ж Р aL 00 А WaP ООО В aQ 0(h) = -1+Л); Loo О {a + b)h gg + ab-f i a остальные элементы матрицы перехода определяются по формулам (1.9) и (1.21). На вход системы на рис. 1.1, ас рассматриваемым объектом регулирования поступает линейно-изменяющееся воздействие и (О = и + at при < > О и нулевых начальных условиях. Определим передаточную функцию W (г) цифрового регулятора, обеспечивающего оптимальный переходной процесс х (Q. Обозначим «2 (vh*) = m, v = 0. 1, 2, ... и найдем значения вектора v = \Xi, х; Хд; х; т\ в дискретные моменты времениг «(0+) = ]0; 0; 0; 0; /Ио1 о" (ft*): о (2ft+) = laGmo; aLnifii аРт; aQm„; mi\; га (С + ftl, + PS+ QLfnio + oGmi-i a (L + PM + QP) Шд + al,mi a(AP + QW)ma + aPmi aBQnig -j- aQmi ff?2 D (3ft+) = ( C; D", Ei F; , С = a\GJrhL + PS-\-QL-Yh(L + PM + QP) + S(AP + QW) + + BQI,] «0 + «(G + hL + PS + QL) + aGm; D=a [L + -b PM + QP + Ж (АР + QW) + BQP] mo + ce (L + РЖ + QP) mj + --aLma; E = aiAP+AQW + BQW)mf, + a(AP + QW)mi-b -i- aPm; F = aBQm + aBQm 4 aQm\ rC + hD + SE + LF + aGmg-D + ME+PF +aLms AE + + aPms BF* + ceQma © (4ft+) = Чтобы переходные процессы в объекте регулирования при нулевых начальных условиях заканчивались за время, равное 4ft, необходимо равенство вектора v (4ft+) вектору = U-\-+ 4Ла; а; 0; 0} О . Составляя систему уравнении v (4ft+) = и решая ее относительно неизвестных т, т, щ и т, получаем следующие окончательные результаты: «1 =-«о (I + ++ ЩП1Т1=) /п, = то (Л + Д + т - (fij"(fi. о; > (1.111) аЬАВ щ = -тоАВ + (, а: ай2(1-Л)(1-В) Г + 4ft- 5ft - 3ft (Л + В) + ftЛв 2 (1 - Л) (1 - S) Определим входные дискреты цифрового регулятора e(G*) = t/ -л:1(0+) = [/; ©(ft*) = ai + fta -(ft+) == [/ + fta - oGmo = f/ + ft2 (c + 6>ft (1-Д) -fe(t -Л) (1,112) (1.113) 2 aft 1- • аЧ{а - Ь) e (2ft+) = og = [/ + 2fta - (2ft+) = С/ + 2fta - a (G-f ft! + PS + + (2I.)m„-aGm, = f/ + 2fta-{[ d>B (1 - B) - 6M (1 - Л)] + «262(0-6) J+ дз (i - В) - fcs (1 A). ab (a + b)h e(3ft+) =t/ + Sfta-j{ (a-b) Оз = [/ + 3ft a - (3ft+) = [/ -f 3fta - С = 5ft htja + b) азд (i:-в) бз2 (i-Л) (1.114) a262 (Я b) 3ft2 ft (fl + fe) g»B(l - B)-6ЭЛ(1 - Л) «1 + c6 "T- аЧ(а - Ь) (a + fc)ft дЧ1-Д)-г"(1-Л)1 . + [2~ OA + аЧ{р - Ь) J"4* * Передаточная функция оптимальнога цифрового регулятора (см. табл. 1.4, п. 9) где 6о = "о; f>i = mi; Ь-щ; Ь - щ. Оптимальные переходные процессы в интервале О* < / < ft, = т, определяются вектором (т) = I aG (т) <xL (т)тд; аР (т)«оГ aQ(T)mo;mo, (1.117) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |