
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] печит переходной процесс на выходе системы за минимальное время Nh, но перерегулирование этого переходного процесса может быть любым, в зависимости от параметров форсирующего звена. Рассмотрим систему управления на рис. 1.1, а с объектом регулирования, математическая модель которого описывается передаточной функцией G (s) = а (s + d) [s (s + b)]". Пусть на вход системы поступает воздействие и {() = U -\- ct ш начальные условия в системе - нулевые. Схема аналогового моделирования объекта изображена на рис. 1.23. Запишем дифференциальные уравнения состояния системы: = х, Х2 = dXg - с.«2 - Ьх; Xg = акд - Ьх; щ = 0. Рис. 1.23 Переписывая уравнения в векторно-матричной форме в = Av, где « = [Xi, Xji, Xg, «2], определим дискретную матрицу перехода в виде I h D аЕ О 1 id~b)Q a(h + D) О О В aQ ООО 1 где Q = j(l -В): D: ~2hb + 2 - 2B)+; B = e- (1.126) {bh-l+B); £ = d~i 263 {hb~ Обозначая u{\h*)=m, v = 0, 1, 2 .... последовательно находим V (2ft+) = V (3ft*) = «(0+) = 0: 0; 0; mj; v (ft*) = I аЕшо, a (ft + D) 1щ; aQm; [; с. (£ + ft2 + ftD + DQ) ffio + a [ft + D + (d - 6) Q2] 4. a (ft 4. D) mi aBQtria + aQmi mg a{E + 2ft2 + 2ftD Ч- DQ + ft (d - 6) + bQD\+ + a (£ Ч- ft2 + ftD + DQ) mi + aEm, a[ft-f D + (d-6)(l+B) Qmo + a[h + D + + (d - 6) Q2] + a (ft + £>) m; aBQm 4. aBQmi + аС1щ в конечное состояние систему можно перевести за три периода прерывания мгновенного ключа (за 3 h), если выполнить следующие условия: xi (ЗА+) = f/ -f- Зйа; % (Зй+) = о; лгд (ЗА+) = О Иа (3/г+) = ms = 0. Решая систему уравнений (1.127), находим ahd(l -В) ЬВ тВщ-с-щ-у, Ь Г.. /5й ft 1 iV в - аНЧ (1-В) + V"2 - rz-g + "F - j (1.127) (1.128) (1.129) (1.130) (1.131) Подставляя выражение (1.131) в (1.129) и (1.130), оконча- тельно Находим Ь(\+В) --dh4(l-B) и + 0 (&i h \2 ~l-B = аНЧ (1 - В) .+4-r=B+T-d-jj i + Bjy (1.132) , (1.133) Определим входные дискреты цифрового регулятора: е(о+) = г/-л;1(о+) = г/; 0 (Л+) = U + ha - Xx (ft+) = f/ + fta - - (ft262 2ft6 + + 2 -2B)+ft2 (1.134) 0(2Л- = U + 2ha \d - = U+2hp~Xi(2h*) 3rfft2 2(d-~ b) (6ft-B + B2)Jmo + [ti4 - 2bh+2 - 2B)+h tn. (1.135) Передаточная функция цифрового регулятора (см. табл. 1.6, п. 1) п7/,ч Ьр + Ьг- + Ьг- где коэффициенты 6(, = то; bi - irii; Ь - т; Gi=0(ft+); Оа = = ©(2/i+) можно определить по формулам (1.131) - (1.135). Переходные процессы на выходе системы (см. рис. 1.1, а) с рассмотренными объектом регулированиями цифровым регулятором при параметрах а = 10 с fc = 5 с , шаге квантования А = 0,1 с, нулевых начальных условиях и воздействии на входе И (О = 1 + 2/, t/ = 1, а = 2с-1 показаны на рис. 1.24, а для указанных значений параметра форсирующего звена d. На рис. 1.24,6 показаны переходные процессы иа выходе системы (см. рис. 1.1, а) при параметрах а= \0с~, b = 2 с~, шаге квантования h = 0,1 с, нулевых начальных условиях и единичном ступенчатом входном воздействии. Рассмотрим систему управления на рис. 1.1, а с объектом регулирования, математическая модель которого описывается передаточной функцией G (s) = а (s + d) [s (s + a) (s + b)] . Пусть на вход системы поступает типовое воздействие « (О = = и ctn начальные условия в системе - нулевые. 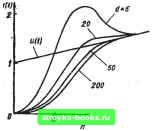 гл 31: i в
Рис. 1.24 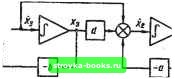 Рис. 1.25 Схема аналогового моделирования объекта представлена на рис. 1.25. Запишем дифференциальные уравнения состояния для системы! = лга; х = ащ + (d - Ь)хд - ах; Хд = аи - bxi = 0. . Переписывая уравнения в векторно-матричной форме v = Av, где v = % Хд, Из}, определяем дискретную матрицу перехода в виде I М R аР О А W a{R + M) О О В aQ ООО 1 Ф(Л): где А = 6-°"; В = е- М = Ц- ; Q В-А а - Ь d - l j[ ЬА - аВ V+ а-Ъ ) аВ - ЬЫ abh-(a + b)+ f, ah-I-{-А [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [ 33 ] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |