
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [ 47 ] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] усиления Кг, н есть возмозкиость измерить скорость выходной координаты объекта лгг (ft). В этом случае вет необходимости . ополнительно формировать управляющее воздействие Hi, так как = яг, = -Bwo. а управляющие воздействия, соответствующие реальному параметру К = а/Ь, на основании формулы (2 .23) можно определить в виде то = ко®п = /[(ft) ®п; Щ==~Вщ. Схема системы с регулятором, реализующим эти зависимости, показана на рис. 2.9, а, а временные диаграммы, поясняющие рпцлирШиш T(S) -ffl- Уг(1) 72/1 Фиксйшср 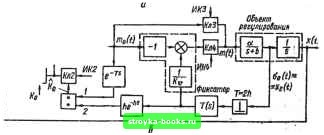 Рис. 2.9 работу этой системы, - на рис. 2.10. Следует иметь в виду, что регулятор должен обязательно содержать генератор тактовых импульсов, устройство синхронизации (для формирования импульса синхронизации или импульса запуска) и формирователь импульсов коммутации. Эти устройства (иа схеме не показаны) подробно описаны в гл. 3. Регулятор включает в себя следующие элементы: два мгновенных ключа с шагом квантования Т = 2ft, два фиксатора нулевого порядка с передаточной функцией T(s) = (1 - e~)ls, элементы задержки с передаточными функциями fte"* и ё~, перемножитель, делитель, масштабирующий усилитель с коэффициентом передачи -В н четыре ключа Кл1-Кл4, которые отрываются при наличии положительных импульсов коммутации ИК1-ИК4 на их управляющих входах. При поступлении скачка входного сигнала и (О импульс синхронизации запускает схему регулятора, и в интервале О <: < < Г на перемножитель поступают сигнал ошибки во и сигнал, равный расчетному коэффициенту Кр. На входе объекта 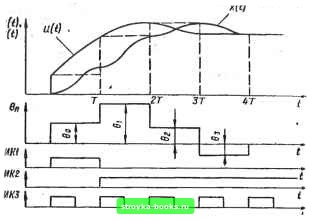 <o(tl h<Selt-h) izn nn cz! nx 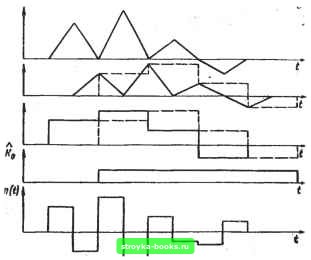 Рис. 2.10 формируются расчетные сигналы гпр = Ко и »rti = -ВШр. В момент < = Г на входах / и 2 делителя формируются сигналы Шо и ЛжгСЛ), которые сохраняются в интервале Г < < < 2Г. Таким образом, на выходе делителя в интервале Г < < < 2Г идентифицируется параметр и на входе объекта формируются сигналы яг© - и гПх = =-Вщ. В следующих интервалах регулирования nT<t<Z < (rt + 1)Г, и = 2, 3, параметр Ко идентифицируется таким же образом и сохраняется иа выходе делителя. Если входной, сигнал не изменяется, в системе устанавливается ошибка, равная нулю. Если изменяющимся или неточно рассчитанным параметром в объекте регулирования является постоянная времени То = = 6" и есть возможность измерения скорости выходной координаты объекта, то управляющие воздействия, соответствующие реальному параметру Го = b~, можно определить по формулам (2.49) и (2.50). При построении систем с настраивающимися регуляторами (рис. 2.9) необходимо учитътать следующее. Параметры Ь, Kv а значит, и параметры В, Ко и Ко идентифицируются на каждом интервале регулирования длительностью Т = 2h по измеренным на этом же интервале координатам объекта и воздействиям иа объект. Управляющее воздействие (Xj (для первого интервала) или ttti (для следующих интервалов) формируется по идентифицированным параметрам и измеренным на этом же интервале координатам объекта и воздействию Шр или тр. Воздействие Шц формируется по координатам объекта и воздействиям на. объект, измереинымиа предыдущем интервале, и при формировании воздействия используются параметры, идентифицированные на предьщущем интервале. С учетом этих замечаний на основании формул (2.49), (2.50) можно записать , r Ро() Pqi (ft) Pqb (h) "oAu ШолКо frionKv ., 2oi) aoi(h) Gon{h) mo@t " 0162 tno„ i@n - rrionl "hi-hOo(h) "o~ha„i(h) /юо„.1 (h) где и - номер интервала регулирования (rt=0, 1, 2, ...). Система с регулятором, реализующим эти зависимости, изображена на рис. 2.9, б, а эпюры, поясняющие работу этой системы - на рис. 2.И. Регулятор состоит в основном из тех же элементов, что и регулятор в системе на рис. 2.9, а, но масштабирующий усилитель е коэффициентом передачи В заменен блоком (на рис. 2.9, б обведен штриховой линией), состоящим из инвертора, сумматора и пропорционального звена с коэффициентом передачи 1/К-о- Кроме того, моменты замыкания мгновенного ключа в цепи обратной связи смещены на время Л относительно моментов замыкания мгновенного ключа в прямой цепи (ступенчатая функция Oon(h) смещена на время ft относительно ступенчатой функции в„ на рис. 2.11), Импульсы коммутации ИК1-ИК4 такие же, как и в схеме на рис. 2.9, а. Блок на входе ключа Кл4 формирует управляюп;ие воздействия в соответствии с формулой т±п = Ооп {h)IKv - Щп в интервалах (n + h)Tt<{n + l)T, и=0, 1, 2, ... Настройку регулятора выполняют следующим образом (рис. 2.11). При поступлении скачка входного сигнала и (i) импульс синхронизации запускает схему регулятора и в интервале [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [ 47 ] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |