
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 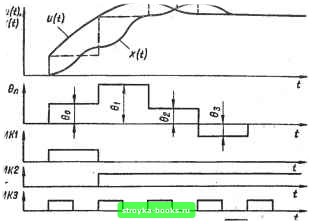 Hand) ивхг mod) m(i) jzm си I-I f ri: J t
<6 <5 Рис, 2.11 о <: / < г на умножитель поступают сигнал ошибки 0оИ сигнал, равный расчетному коэффициенту Кр. На выходе умножителя формируется расчетный сигнал то = /Совд, который в промежутке О <: < < h поступает на вход объекта через ключ КлЗ. В промежутке h<.t<T блок на входе ключа Кл4 формирует сигнал то = (h)IKv - который поступает на вход объекта через ключ Кл4. В момент < = Г на входах 1 к 2 делителя формируются сигналы и кОдф) (эти сигналы обозначены на рис. 2.11 соответственно ui и kxs) которые сохраняются в интервале Г <: < < 27, и иа выходе делителя идентифицируется параметр Ко = (ft) i а на выходе умножителя r2h Фчксотор "icfil регилироНаиии --Йдз-[ j д., fmcmncp Tzh I •Риксстор j2h Рис. 2.12 формируется сигнал mot = ©i = • Этот сигнал поступает на вход объекта через ключ КлЗ в промежутке Г <: i < Г + h, а в промежутке Г й < < < 27" блок на входе ключа Кл4 формирует сигнал tnix = Coi(Ji)IKv-ou который поступает на вход объекта через ключ Кл4 и т. д. Нетрудно заметить, что передаточная функция блока, включенного перед ключом Кл4, равна идентифицированному пара- метру - В. Действительно, Шщ == - Втоп = ~ - пцп Параметры /Со и в идентифицируются на каждом интервале. Если входной сигнал не изменяется и параметры объекта регулирования постоянны, ошибка в системе равна нулю. Если изменяющимися или неточно рассчитанными параметрами в объекте являются постоянная времени Го = и коэффициент усиления Kv и есть возможность измерения скорости выходной Координаты объекта, то управляющие воздействия на объект регулирования, соответствующие реальным параметрам объекта, определяются по формулам (2.56) и (2.57). С учетом этих замечаний на основании этих формул можно записать ftin = - Шоп ОопФ/2) fnon-i®n где л - номер интервала регулирования (п = 0, 1,2,...). Система с регулятором, реализующим эти вависимости, показана на рис. 2.12. Регулятор отличается от регуляторов в системах иа рис. 2.9 блоком (на рис. 2.12 обведен штриховой линией), который в соответствии с первой зависимостью формирует управляю1Щ1е воздействия в интервалах (« + h)T <: t < < (и -J- 1)Г, л = 0. 1. 2, ... Этот блок состоит из двух умножителей, делителя, инвертора, вычитающего устройства, мгновенного ключа, моменты замыкания в котором смещены на время ft/2 относительно моментов замыкания мгновенного ключа в прямой цепи, и фиксатора. Нетрудно заметить, что передаточная функция блока равна идентифицированному параметру - В. Таким образом, системы на рис. 2.9, б и 2.12 отличаются только блоками идентификации параметра й и работа этих систем иллюстрируется одними и теми же эпюрами (см. рис. 2.11). 2.3. УЧЕТ НАСЫЩЕНИЯ В СИСТЕМАХ УПРАВЛЕНИЯ С ЦИФРОВЫМИ РЕГУЛЯТОРАМИ Нелинейность типа «насыщение» существенно влияет на переходные процессы в системах управления, значительно увеличивая время регулирования. Структурная схема системы с нелинейным элементом (ЯЗ) показана на рис. 2.13, а, характеристика нелинейного элемента с уровнем ограничения I/ - Цифровой рееумтор Фиттр ui(t) ОНект - H(s) G(s) m(i) x(t)
Рис. 2.13 на рис. 2.13, б. объекта При этом управляющее воздействие на входе т(0 = и2 (О при 1 И2 (О I « t/orp: при 1 «L (О I > и, огр» где «2 (t) - управляющее воздействие на выходе цифрового регулятора (с учетом фиксатора нулевого порядка). Для любого линейного объекта регулирования при ступенчатом входном воздействии величиной U можно определить шаг квантования Л, при котором система на рис. 2.13, а работает в линейном режиме, а регулятор обеспечивает оптимальные переходные процессы. Пусть объект регулирования в системе на рис. 2.13, а описывается передаточной функцией G (s) " « Is (s + b)]-. Тогда для [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [ 48 ] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
||||||||||||||||||||||||||||