
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Передаточная функция объекта регулирования Амплитуды импульсов оптимального управляющего воздействия на входе объекта obAB-F /io + Ai + ft2 + a + b ab - an CBqBi c(\-Bi)H Ъ 1- {l-B)F - A2{l-B2)FE\i chpE-hxG + hFAB. M = - + hjL - hiH + Б 5 . M,-6,)[ft,(l-Ba)-ft2Ba(i-Bi)l (l-B)E i E = Л2В2 (В1-Л1) + Bj (i-Bj - (i-yy: f = Л1В1 (B„-y,) + Bi (1-Bo) - (l~A„); a = BiBa (1 - Л,) (1 ~ Bo) - AiA (1 --В)(1-Л); H = BoflA (1 - 2) - Л1>12 (1 - Bt); L = ЛВа [BoBi (1 - Л,) - Л„Л1 (1 - Bi)]; В„ = е-"°; Bt = e-\ Ве- с неравномерным шагом, при единичном ступенчатом воздействии на входе систем приведены в табл. 2.1, а для астатических объектов регулирования при линейно изменяющемся воздействии на входе систем - в табл. 2.2. Как видно из таблиц, амплитуды управляющих импульсов являются функциями параметров передаточной функции объекта и длительности шага регулирования 1ц, hi, hj, где N - порядок передаточной функции объекта регулирования, параметров входного воздействия и вектора х (0). Пусть в цифровом регуляторе шаг квантования равен- ft. Тогда каждый шаг регулирования можно выразить в виде ftl = kh, где Jt. -целое число, т. е hkoh; h\ = kih, .... ftJv»l = *лг-1-При этом ft!y>A. Длительномь переходного процесса на выходе системы V=0 V=0 где - целые числа. Теперь задачу синтеза цифрового регулятора можно сформулировать так: необходимо определить числа k, при KOTopfclx Т = min и < Up {т - амплитуда на v-m шаге регулирования длительностью kji), и амплитуды импульсов управляющего воздействия на входе объекта регулирования при заданных передаточной функции объекта G (s) и входном воздействии и (/). Эта задача относится к задачам нелинейного целочисленного программирования с линейной целевой функцией и ограничениями в виде системы неравенств и не имеет универсального алгоритма решения. Рассмотрим алгоритм, основанный на мeтoe Гаусса - Зайделя, с использованием направленного перебора [29]. Аргументы k. функции Т \k), для которой необходимо найти минимум, ограничены снизу значениями kp = 1, й-[ = 1, Схема алгоритма поиска оптимальных значений k, при которых Т == min и m., < i/pp, и расчета при определяемых шагах регулирования kh = амплитуд показана на рис. 2.16. Входными параметрами алгоритма (блок /) являются: шаг квантования А; число шагов квантования k*, которые укладываются в шаг регулирования при заданном уровне ограничения и прн равномерных шагах регулирования; заданный уровень ограничения foj-pl параметры входного воздействия и о; количество шагов регулирования TV, равное порядку передаточной функции объекта регулирования. В блоке 2 формируется массив ~ = k*, гдev==0,l.....N-l, т. е. начальное количество шагов квантования длительностью h в v-m шаге регулирования, а также рассчитывается начальное суммарное количество шагов квантования h по формуле ftj = Nk*. Далее последовательно длительность каждого шага регулирования, начиная с N - 1-го, уменьшается на шаг квантования h (блоки 3 и 4). При этом каждый раз выполняется расчет амплитуд mi (1 = 0, 1, ... , N-l) на всех шагах регулирования hi = kih (блок 6) и сравнение полученных величин т/ с величиной огр (блоки 7-10). Если все значения < U, производится возврат к блоку 4. Если хотя бы одна величина mi превышает уровень ограничения Uorp управление передается блоку 12, где производится восстановление прежней величины k, (прибавление единицы к количеству шагов квантования на v-m шаге регулирования), и переход к (v - 1)-му шагу регулирования. В блоке 13 проверяется окончание цикла по количеству шагов регулирования. По окончании цикла оптимизации рассчитываетси суммарное ко- личество шагов квантования h по формуле й = срав- Q начат h,k*U,d,N,Uoep 1- г-г- l(*l(**likz=kik=l<* Расчет mi (L=0,U...,N-1} kv-ki,*li v = v-/ 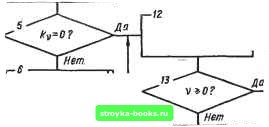 /(/ = 2 Лу 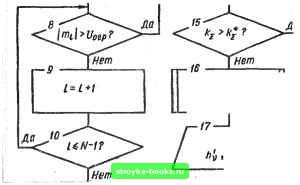 Расчет my Вывод Рис. 2.16 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |