
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] начало -1 ВВоВ I 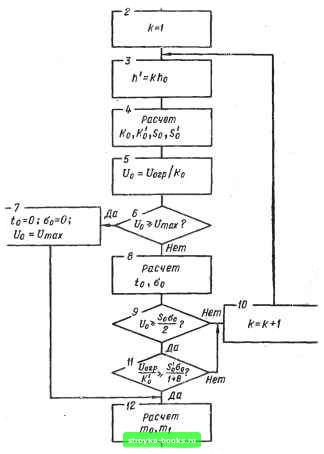 Г~ Вывод I рассчитанных I параметроб I Q Конец Рис. 2.22 Структурная схема системы управления с оптимальным для ступенчатого воздействия (величиной U) дискретным регулятором показана на рис. 2.23, а. Объект регулирования с передаточной функцией С (s) = а [s (S + имеет нелинейность типа «насыщение» (см. рис. 2.13, б). Передаточная функция циф-роБОгорегулятора М*{г) = М (z)/ (1 + z~), где М (г) = т„ + + тг . Нелинейные элементы НЭ1 и НЭ2 имеют характеристики, изображенные соответственно на рис. 2.23, б и е. Ключи Кл1 и Кл2 замкнуты при нулевом сигнале и разомкнуты при ненулевом сигнале на их управляющем входе. При подаче на вход Цифровой регулятор Фиксатор Объект рвгулиробания fuKCamop j 2h T(s) -[T- x(t) иеых Рис. 2.23 системы скачка величиной U, дискретный регулятор работает следующим образом. Если > Uo, ключи Кл1 и Кл2 разомк- нуты и на вход объекта подается величина U до тех пор, пока выходная координата системы не достигнет U. - (/о- При достижении выходной координатой указанного значения ошибка системы 6 (Q становится равной Up, ключи Кл1 и Кл2 замыкаются и на входы цифрового регулятора поступают скачок ошибки величиной Uo и скачок скорости величиной cVniax- Цифровой регулятор формирует управляющие воздействия на входе объекта регулирования в соответствии с выражениями (2.69). Переходные процессы в системе рис. 2.23, а при параметрах объекта регулирования а = 10 с, 6=2 c-, U. = 10 и основном (минимальном) шаге квантования в дискретном регуляторе с fto = 0.02 с показаны на рис. 2.24. При U = 5 время переключения to= 0,257 с, ошибка при переключении Up - 2,19, выходная скорость объекта при переключении oq = 20,12 c-, Vnmy 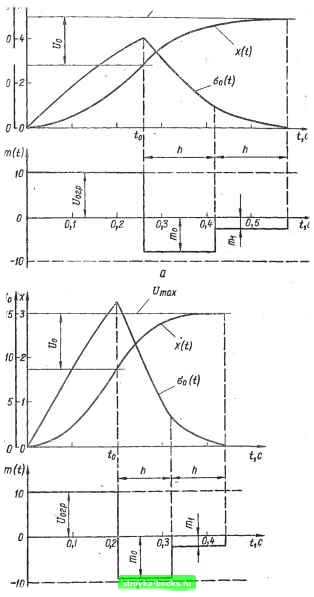 Рис. 2.24 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |