
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [ 57 ] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] аргумента ft* = ftfto превышает значение t/p, рассчитанное для непрерывного аргумента ft* (с уменьшением минимального (основного) шага fto это различие становится незначительным). Из неравенства (2.74) видно, что шаг квантования ft* зависит только от постоянной времени объекта регулирования (частоты сопряжения Ь). Для указанных параметров объекта и непрерывного мента ft получаем следующие значения: ft* я:; 0,328 с; Uq пред аргу-7,92 = 50 с-1. При ftfl = 0,01 с получаем ft* = 0,33 с к Uq л! 7.97. При Ао = 0,02 с получаем А* = 0,31 с и [/д лг 8,39. 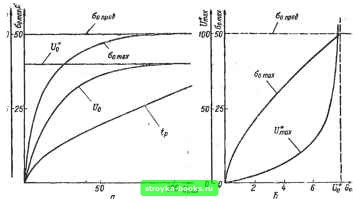 Рис. 2.30 Рассмотрим систему рис. 2.29, а с нелинейным устройством сравнения (рис. 2.29, б). Если Gp > to • ™ можно использовать дискретный регулятор, изображенный на рис. 2.23, и выполнить расчет этого регулятора по алгоритму на рис. 2.22. Если <: t/p, то для заданного Qp выбираем ближайшее (насколько позволяет минимальный (основной) шаг Ао) значение < ©огр условия : ©огр. (2.75) 1У0--г- Выбранному таким образом значению Up соответствует определенный шаг А, для которого по формуле (2.69) можно рассчитать параметры Ко. Кр, Sp и S;, для цифрового регулятора. Для полученных значений Up к h согласно неравенствам (2.70) находим aomax = "i"[2fo/5o; Up/Sh] (2.76) и время Q, необходимое для нарастания скорости до этого значения, из уравнения . . (2.77) Выбранному значению Uf, соответствует не только определенная скорость Оо ах> "О и определенное значение U = V (рис. 2.30, а), которое можно найти из выражения = + Оо щ>ед I (< - 1 + е-о). (2.78) вагрУо= 7.92  Рис. 2.31 Рассчитанные по выражениям (2.75)-(2.78) при указанных параметрах объекта регулирования зависимости Gqk U от 0огр построены на рис. 2.30, б. Если полученное значение Uбольше или равно заданному входному воздействию U, то можно использовать дискретный регулятор, изображенный на рис. 2.23, и выполнить расчет этого регулятора по алгоритму на рис. 2.22 на заданное входное воздействие U. Если же полученное значение U меньше заданного входного воздействия U, то вместо управляющего воздействия t/ppp, подаваемого на вход объекта регулирования в течение времени t*, необходимо подавать на вход объекта новое управляющее воздействие Uy < U в течение другого времени tp. Два новых неизвестных t/p и t,, можно вычислить в ре- зультате решения системы уравнений: Oomax - fmax-fo = %(W„-l+e-««). (2.79) Устройстбо сравнений Цифровой I----;---р eft) 7-2Л fUKcamp f, регуттр Фиксатор Объект регулировании Фиксатор -р,/. T(s) 6o(t)  Рис. 2.32 В этой системе уравнений величины Ор, " рассчитаны ранее по выражениям (2.75) и (2.76), а f/j, ~ ""ое воздействие на входе системы. Время отработки входного воздействия величиной t/n,ax определяется как =to +2ft, где шаг h в цифровом регуляторе соответствует Uq. Зависимости Uy и от величины U при различных Gp и заданных параметрах объекта регулирования построены на рис. 2.31, а, б (при этом каждой кривой на рисунках соответствует определенное значение Uq и шага Л). Хотя расчет дискретного регулятора для системы рис.2.29, а с устройством сравнения, имеющим нелинейность типа «насыщение» (рис. 2.29, б), и объектом, имеющим нелинейность типа «насыщение» (рис. 2.29, е), значительно сложнее по сравнению с расчетом дискретного регулятора для этой системы, имеющей только одну нелинейность в объекте, схема регулятора (рис. 2.32) аналогична схеме регулятора, изображенного на рис. 2.23. Единственное отличие заключается в том, что нелинейный элемент НЭ в системе на рис. 2.32 имеет уровень ограничения не U, а lynp < огр (рис. 2.32, б). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [ 57 ] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |