
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Для рассматриваемой системы, используя подстановку г --H + w)l(l -w) п выражения (2.82) и (2.83), определяем (2.85) 1-6, 1 -f В {l~w} (2.66). w(l + BiW) Типовые ш-передаточные функции цифровых регуляторов представлены в табл. 2.3, а ш-передаточные функции объектов регулирования (с учетом фиксатора нулевого порядка иа входе объекта) - в табл. 2.4. Если для объекта регулирования, математическая модель которого описывается передаточной функцией <3 (s) = a[s (s + + 6)]-, ,параметры передаточной функции (2.82) цифрового регулятора рассчитаны точно, то ш-передаточиую функцию системы иа рис. 1.1, а в разомкнутом состоянии можно определить по формулам (2.84)-(2.86) (1-ш) 2\ 1 w(l +Aiw) Комплексная передаточная функция разомкнутой системы: i+A oi+fli 26 (l-jv) iv{l+AiJv) (2.87) По функциям Kp(w)\ = /Cp(/j)) можно строить логарифмические частотные характеристики, т. е. зависимости амплитуды (в децибелах) и фазы (в градусах) от псевдочастоты. Непосредственно по этим кривым можно определять запасы по модулю и по фазе, характеризующие степень устойчивости системы, а перенося амплитудную и фазовую характеристики на обычную диаграмму замыкания, можно определять резонансный пик, резонансную частоту, полосу пропускания и оценивать динамические свойства замкнутой системы [33; 38]. При изменении псевдочастоты о от О до м действительная частота w увеличивается от О до ojft/2 = n/h. Перепишем функцию /Ср (Jv) в виде /С„ (М = I /С (iv) I ехр {/ф„ (;)J ==B(v) + jM (V), (2.88) \KpUv)[ = VB\v) + MHv); 4>o{v) = aTctglM(v)./B (v)\; (2.89) М {V) = -Ко pqrj 2 - . (2.90) Предположим, что параметры передаточной функции W {w) регулятора остались прежними, а параметры передаточной функции объекта изменились, и математическая модель объекта описывается передаточной функцией G (s) - а [s (s + b)]". Тогда ш-передаточная функция объекта регулирования имеет вид rдeBl = L±; В-=,-№. 1 -В В этом случае комплексная передаточная функция разомкнутой системы 26 jv(l+BM > Kp(/i) = Ko 1 , .-(2.91) Эту комплексную передаточную функцию можно представить также формулами (2.88) и (2.89), в которых Kq/i 1 + fei (1 + ttf) (f) + (, - gi) Mq (ч) 2 1+a, \АУ Kph l+bj (1 + AiBjV) Mg (V) -v(Ai- Bi) Bo (V) M(v) 2 l+fli l + Av ., + 5,-(в,-Д)(,-В>) B„ (t) Mp {V) = 6 1 + Bt)2 . l-g,. + (e,-)(l+B,). 6 d (1 + bIv) (2.92) (2.93) Таким образом, комплексную передаточную функцию в разомкнутом состоянии Кр(р) рассматриваемой системы на рис. 1.1, а можно определить по формулам (2.87)-(2.90), когда параметры оптимального цифрового регулятора точно соответствуют параметрам объекта регулирования, и по формулам (2.88) (2.89), (2,91)-(2.93), когда параметры цифрового регулятора не соответствуют параметрам объекта регулирования. В качестве примера рассмотрим систему на рис. 1.1, а, в которой шаг квантования ft = 0,1 с и объект регулирования имеет передаточную функцию G (s) = o[s (s-f 6)]"" с расчетными параметрами а = 10 с , 6 = 2 с Оптимальный для ступенчатых воздействий цифровой регулятор при таких параметра» объекта имеет передаточную функцию 1+Ь.г~ 1 -0,81872"" . () = oTT=""33j-q:o»- Рассчитанные по формулам (2.88)-(2.90) логарифмическая амплитудно-частотная Kp(jv) и фазочастотная фр (v) характеристики показаны на рис. 2.36, кривые 1. По этим характеристикам находим: псевдочаетоту ереза = 0,356, запас устойчивости по фазе на этой-частоте v = 64°, запас устойчивости по 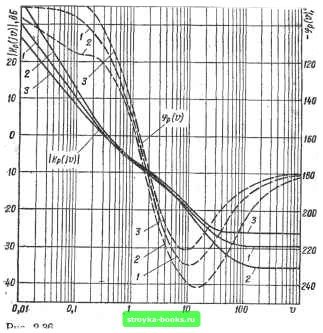 амплитуде 9,74 дБ (на псевдочастдте перехода фазовой характеристики через - 180°). Изменим частоту сопряжения в объекте, например 6=1, оставив без изменения все остальные параметры системы. Рассчитанные по формулам (2.89), (2.92), (2.93) характеристики I Kpijv) I и фр(г) показаны на рис. 2.36, кривые 2. По этим характеристикам находим: псевдочастоту среза у. = 0,368, запас [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |