
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [ 77 ] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 
Рис 3.27 3.4. РЕГУЛЯТОРЫ С ПЕРЕМЕННЫМ ШАГОМ КВАНТОВАНИЯ В системах управления с линейными объектами регулирования (см. рис. 1.1, а) цифровые регуляторы обеспечивают строго определенные амплитуды управляющих импульсов на входе объекта. Чем меньше шаг квантования h (меньше время регулирования Т = Nh), тем больше амплитуды управляющих импульсов. Если объект регулирования имеет нелинейность типа «насы- УИУВХ Ш2 Н 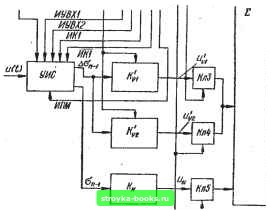 mm*) Рис. 3.28 щение» (см. рис. 2.13), то необходимо накладывать ограничение иа максимально возможную амплитуду управляющих импульсов. При этом чем больше величина воздействия на входе системы, тем меньший коэффициент усиления должен иметь регулятор, а значит, тем больший шаг квантования необходимо использовать (время регулирования Т = Nh в этом случае может значительно возрастать). Часто системы управления работают в двух режимах: отрабатывают скачки входного воздействия и ведут слежение за медленно изменяющимся входным сигналом. В этом случае целесообразно использовать регулятор с переменным шагом квантования [25]. Скачки входного воздействия регулятор будет отрабатывать с шагом h за время Т - Nhx, а слежение за медленно изменяющимся входным сигналом - с шагом fta < hi, обеспечивая высокую точность слежения. Функциональная схема регулятора с переменным шагом квантования, построенного по принципу оптимального для линейно изкеияющихся воздействий регулятора, показана на рис. 3.28. Эта схема отличается от схемы на рис. 3.25 следующими дополнительными элементами: регулируемым усилителем РУ, дополнительным каналом формирования управляющих воздействий «2 и w2СОСТОЯ щим мздвух устройств С пербменными коэффициентами передачи /(.д " v2> " электронными ключами Кл/ • • Кл4. Регулируемый усилитель предназначен для увеличения общего коэффициента усиления при переходе к меньшему шагу квантования. Усилитель (рмс. 3.29, а) выполнен на инвертирующем операционном усилителе (микросхема DA1 типа К140УД7), коэффициент усиления которого изменяется скачком при помощи электронного ключа (на полевом транзисторе VT1 типа КПЮЗИ), управляемого импульсом коммутации ИК2. При работе регулятора с шагом /г, электронный ключ замкнут и коэффициент усиления равен (/?2 + Rs)lпри работе регулятора с шагом ftj электронный ключ разомкнут и коэффициент усиления усилителя равен (Я» + + R4) I Ri- Устройства с переменными коэффициентами передачи /fj, K\,i и К,2, выполнены по схеме на рис. 3.7 (млн по схеме рмс. 3.9) и отличаются только значениями устанавливаемых коэффициентов передачи м шагом квантования. Электронные ключи Кл1 • • • Кл4 выполнены по обычной схеме (рис. 3.29, а, б, в) на полевых траН висторах типа КП ЮЗИ и управляются импульсами коммутаций ИК2, ИК2 так, что при работе регулятора с шагом hi ко входам сумматора (рис. 3.28) подключены выходы устройств с переменными коэффицментамм передачи ATi, /Ср а при работе регулятора с шагом /Zj - выходы устройств с переменными коэффициентами передачи К.,,, К\,о- Устройство выборки и хранения УВХ и устройство синхронизации УС выполнены соответственно по схемам на рис. 3.4 и 3.5; сумматор - по схеме на рис. 3.26,6. Принципиальная схема устройства измерения скорости и приращения скорости изменения входного воздействия УИС, используемая в схеме на рис. 3.28, имеет небольшое отличие от схемы на рмс. 3.23: вместо сумматора 2 1 (см. схемы на рис. 3.22 и 3.23) с постоянным коэффициентом передачи введен сумматор с переменным коэффициентом передачи. Принципиальная схема этого сумматора показана иа рис. 3.29, б. Коэффициент передачи сумматора изменяется импульсом переключения масштаба ИПМ. Этот импульс открывает электронный ключ (на полевом транзисторе VT6 типа КПЮЗИ) в режиме работы регулятора с шагом hi и первого цикла работы регулятора с шагом ftj- По окончании первого цикла работы регулятора с шагом h ключ размыкается и коэффициент передачи сумматора увеличивается так, чтобы обеспечивалось постоянство масштаба напряжения, пропорционального скорости изменения входного воздействия при умень-шении длительности интервала измерения скорости. Принципиальная схема формирователя импульсов управления ФИУ также немного отличается от схем, изображенных на рис. 3.12 и 3.26, а. Во-первых, генератор тактовых импульсов выполнен так, что частота импульсов скачкообразно изменяется путем соответствующей коммутации. Во-вторых, в схеме ФИУ имеется дополнительный каскад формирования импульса переключения масштаба. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [ 77 ] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |
|||||||||||||||||||||||||||||||