
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [ 78 ] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] кг юн г R3I0BK ш) мм И1ШЗИ -ISB к R6 2M Dm быв.15) Рис 3.29 VTI5 итози I-15в дАг(8ывв) ввтк RSWH R7IOOt( 3 VT6 . юзи Т B25 IM X-JIL НД503 BBS (вывЗ)
юн I-г- -ISB Принципиальная схема генератора тактовых импульсов с изменяемой частотой следования изображена на рис. 3.29, в. Электронный ключ (иа полевом транзисторе VT15 типа КП103Й), включенный параллельно с резистором RS5*, управляется импульсом ИК2. Начало этого импульса совпадает с моментом поступления скачкообразного входного воздействия, а полярность его такова, что во время переходного процесса ключ разомкнут и частота генератора, а значит, и длительность шага Л, определяются резисторами R1* и R35*. По окончании переходного процесса импульс ИК2 изменяет полярность иа противоположную, ключ замыкается и частота генератора скачком увеличивается до величины, соответствующей шагу fta (частота генератора в этом режиме определяется величиной резистора Rn. Принципиальная схема формирователя импульса переключения масштаба ИПМ показана на рис. 3.29, г. Формирователь подключаается к выходу инвертора (микросхема DD7.4) в схеме на рис. 3.26, а, а вход инвертора подключается к выходу «4» дешифратора (вывод / микросхемы DD9). Эпюры, поясняющие работу регулятора с переменным шагом квантования в системе на рис. 3.) с объектом регулирования второго порядка, первых двух циклов ре-регулятор с переменным 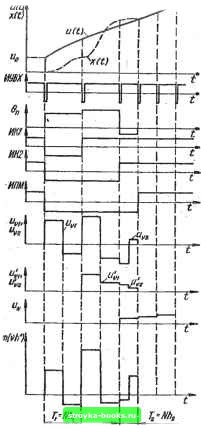 Рис. 3.30 построены на рис. 3.30. В течение гулирования длительностью = 2hi шагом квавтования (рис. 3.28) работает точно так же, как и рассмотренный выше регулятор с постоянным шагом квантования (см. рис. 3.25). По окончании переходного процесса импульс ИК2 изменяет свою полярность на противоположную, ключ на транзисторе VT15 в генераторе тактовых импульсов (рис. 3.29, е) замыкается, что приводит к увеличению частоты тактовых импульсов и уменьшению длительности шага квантования. Одновременно происходит коммутация ключей Кл1...Кл4 (см. рис. 3.28), а также изменение коэффициентой передачи регулируемого усилителя РУ (рис. 3.29, а) и сумматора (рис. 3.29, б) в схеме УИС, что обеспечивает дальнейшую работу регулятора с шагом 2 <! h. 3.5. ПОСТРОЕНИЕ ЦИФРОВЫХ РЕГУЛЯТОРОВ НА МИКРОПРОЦЕССОРАХ Современная элементная база цифровой техники открывает широкие возможности построения цифровых регуляторов с программной реализацией операций в реальном времени иа основе микропроцессоров (МП). Микропроцессор - автономное функционально законченное устройство, состоящее из одной или нескольких программно-управляемых БИС, включающее все средства, необходимые для обработки информации и управления данными, и рассчитанное на совместную работу с устройствами памяти и ввода-вывода информации. ,Структура МП должна удовлетворять трем основным требованиям: 1) быть функционально гибкой; 2) обеспечивать высокое быстродействие; 3) иметь недорогую технологическую реализацию. Задача программной реализации цифровых регуляторов, в первую очередь, предполагает выбор микропроцессорного нд-бора (МН). Для оценки возможных вариантов программной реализации регуляторов для разных ЖЯ составляют программы, реализующие алгоритм обработки, и рассчитывают время выполнения алгоритма. Варианты, удовлетворяющие заданным требованиям по времени вычисления, сравнивают по критерию предпочтения и на основании этого выбирают лучший. В режиме работы в реальном времени (без накопления входных отсчетов) период следования выходных отсчетов равен периоду дискретизации входного сигнала. Поскольку микропроцессор последовательно выполняет операции приема, обработки и выдачи информации, частота дискретизации входного сигнала должна удовлетворять условию /д < (-Гр + r„gp + T)-. где в скобках указано время приема, отработки и выдачи информации. Если ни один из типов МН не обеспечивает требуемого периода следования выходных отсчетов, цифровой регулятор выполняют на базе микропроцессорных систем, в которых процессоры включаются последовательно, параллельно или комбинированно. По сравнению с аппаратурно реализованными цифровыми регуляторами регуляторы с программной реализацией являются менее быстродействующими, но более универсальными, легко перестраиваемыми и имеют лучшие массо-габаритные характеристики. Типовая структура одноконтурной системы управления с микропроцессором показана на рис. 3.31, а. Регулятор в системе на рис. 3.31, а состоит из аналого-цифрового преобразователя АЦП, микропроцессора МП и цифроаналогового преобразователя ЦАП. Следует иметь в виду, что система на рис. 3.31, а имеет два дополнительных ограничения, связанных с применением микропроцессора: 1) конечная скорость выполнения арифметических операплй в микропроцессоре и возникающие при этом временные задержки сигнала в контуре управления; 2)кван-тование сигнала по уровню (например, при длине слова в 8 бит микропроцессор обеспечивает 2* = 256 уровней разрешения). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [ 78 ] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.001 |