
|
|
|
Главная Система автоматического управления [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [ 86 ] [87] [88] [89] [90] [91] [92] в исходном состоянии первый, второй, третий и четвертый г5-триггеры находятся в пулевом состоянии (на прямых выходах - логические «О», на инверсных.выходах - логические «Ь). С инверсных выходов третьего и четвертого iS-триггеров сигналы, логической «1» поступают на входы логического элемента И, выходной сигнал которого (также логическая «1») запрещает работу;управляемого делителя частоты УДЧ. Сприходом перного импульса на вход счетчика-делителя СчД начинается цикл формирований широтно-импульСных сигналов для питания обмоток фаз cfraTopa. Состояние счетчика-делителя дешифруется,. при 6Т0М на выходах дешифратора последовательно появляются сигналы логического «О» (рнс. 4.11, б-эл;).:При поступлении сигнала логического «О» с соответствующего выхода дешифратора на S-вход (н рис. 4.10 верхний) любого нз./?5-трнггерон они устанавливаются в состояние «1», при этом на нх прямом выходе прнсутствует сигнал логической «1» (рис. 4.11, в, и, л, м). Упраи-ленне по -входу (на рис. 4.10 ннжннй) первого и второго RS-триггеров осуществляется с выхода дешифратора, а третьего и четвертого - с выхода управляемого делителя частоты. Сформированные импульсы прямоугольной формы G прямых выхвдов первого и второго Л5-триггеров управляют режимом переключения первого усилителя мощности УМ1, выходное импульсное напряжение (рис. 4.11, w)которого непосредственно запнтывает обмотку возбуждения двигателя. Пауза между импульсами составляет п/3, а частота следования импульсов равна удвоенной рабочей частоте двигателя. Для регулирования скорости н момента питание обметки управления ДАД осуществляется разнополярнымн импульсами регулируемой длительности (рис. 4.11, о). С этой целью на управляемые входы управляемого делителя частоты поступает код управления, а с установкой третьего или четвертого Л5-триггеров в состояние «1» снимается запрет на подсчет им входных импульсов. Для каждого кода управления в управляемом делителе частоты устанавливается определенный коэффициент деления для импульсов частоты ffy, присутствующих яа его входе. Выходные импульсы управляемого делителя частоты, возвращая третий и четвертый iS-триггеры в исходное (нулевое) состояние, определяют длительность управляющих импульсов на их прямых выходах (рис. 4.11, л, м). Коммутатор К определяет очередность подключения управляющих импульсов на входы второго усилителя мощности УМ2, к выходу которого подключена обмотка управления двигателя. Сдвнг по фазе разнополярных импульсов в обмотке управления относительно разнополярных импульсов в обмотке возбуждения состаЁляет 90°.. Для кода управления, раиного нулю, напряжение в обмотке управления равно нулюн пускового момента не создается. Изменяя очередность следования управляющих импульсов с прямых выходов третьего н четвертого Л5-триггеров (рнс. 4,11, л, м) при наличии сигнала реверса, изменяют на 180° фазу напряжений в обмотке упранлення и тем самым добиваются реверсирования двигателя. Мощность, потребляемаи обмоткой возбуждения двигателя прн данном методе управления, близка к мощности, потребляв-мой прн синусоидальном напряжении. По сравнению с фазовым упранлением, значительно уменьшается мощность, потребляв-мая обмоткой управления прн малых сигналах управления. Расширяется диапазон линейного регулирования скорости и момента. Положительные качества устройства обусловлены устранением отрицательного влияния третьей гармоники, что сказыва- ется на увеличении коэффициента нспользовання двигателя по мощности и моменту. Недостатком устройства является то, что прн однообмоточном управлении невозможно создать для двигателя симметричный режим работы, прн котором вращающееся магнитное поле является круговым. При управлении по обеим обмоткам можно обеспечить симметричный или близкий к нему режим и тем самым существенно снизить потерн, связанные со значительной асимметрией напряжения на обмотках. Для создания симметричного режима необходимо одновременно подключать обе обмотки двигателя к двухфазной системе импульсов регулируемой длительности. Схема устройства для симметричного (двухобмоточного) . шнротно-нмпульсного управления двухфазным асинхронным двигателем показана на рис. 4.12. Временные диаграммы, поясняющие работу этой схемы, изображены на рнс. 4. 13, где: а - тактовые нмпульсы; б - импульсы на выходе делителя частоты ДЧ; в, г - импульсы на прямом и инверсном выходах Г-триггера; д-3 - импульсы на прямом и инверсном выходах Г-триг-герон соответственно блоков широтной модуляции канала обмотки возбуждения н канала обмотки управления; и, к - импульсное напряжение на выходах первого и второго усилителей мощности. При симметричном (двухобмоточном) широтно-импульсном управлении двухфазным асинхронным двигателей по сравнению о несимметричным (однообмоточным) уменьшаются активная потребляемая мощность (при нулевом сигнале управления двигатель энергии не потребляет), искажения механических характеристик, пульсации вращающегося момента, улучшаются КПД дв1}тателя и регулировочные характеристики, устраняется явление самохода. При симметричном управлении с критическим скольжением Sp = 1 двигатель имеет более лучшие динамические свойства. Схема устройства для частотно-широтно-нмпульсного симметричного (двухобмоточного) управления двухфазным асинхронным двигателем показана на рис. 4.14. Временные диаграммы, поясняющие работу этой схемы, изображены на рис. 4.15, где: а - тактовые импульсы; б -. импульсы на выходе второго управляемого делителя частоты; е, г - нмпульсы на прямом и иннерсном выходах Г-триггера; 5, е, в, и - импульсы на прямом и инверсном выходах Г-трнггеров соответственно блоков широтной модуляции канала обмотки возбуждения и канала обмотки управления; ж - импульсы на выходе первого управляемого делителя частоты; к, л - импульсное напряжение на выходах первого н второго усилителей мощности. При выборе частоты генератора тактовых импульсов ГГЯ исходят из тех же требований, что и прн частотно-импульсном управлении. Выходные импульсы генератора тактовых импульсов поступают на счетные входы первого н второго управляемых делителей частоты УДЧ1 и УДЧ2, коэффициенты деления которых определяются соответственно зваченнкми кодов регулирования длительности и частоты импульсного напряжения, питающего обмотки статора двигателя. С выхода второю управляемого делителя частоты импульсная последовательность (рис. 4.15, б) поступает на вход Г-триггера, который вызывает поочередное переключение Г-триггеров
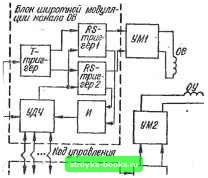 J Блок широтной моА/- J лщаи напала ОУ \* Рис. 4.12 г д е м а и и \ I I I-I, Рис. 4.13 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [ 86 ] [87] [88] [89] [90] [91] [92] 0.001 |