
|
|
|
Главная Интегральный монолит [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [ 64 ] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] 2. Диапазон частот захвата уменьшается. 3. Характеристики помехоустойчивости системы ФАП улучшаются, так как напряжение сигнала рассогласования, возникающее под действием частоты помехи, в большей степени остабляется фильтром нижних частот. 4. Переходная характеристика системы, т. е. реакция контура ФАП на скачкообразное изменение частоты входного сигнала в пределах диапазона частот захвата, становится медленно затухающей. Последнее приводит на практике к ограничению полосы пропускания фильтра нижних частот по соображениям устойчивости системы. Этот вопрос рассматривается ниже в следующем параграфе. 9-11. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ ФАП Контур фазовой автоподстройки обладает частотной избирательностью в полосе частот, в центре которой находится частота свободных колебаний управляемого генератора. Характеристики избирательности системы описываются двумя параметрами: полосой синхронизации и полосой захвата, которые были определены в предыдущем параграфе. Эти хара1ктеристики можно легко связать с параметрами отдельных блоков схемы, показанной на рис. •9-15. Зависимость фазовой ошибки от времени можно выразить дифференциальным уравнением =-KMг[f{trsmo], (9-47) тле звездочкой обозначена свертка; Ко - коэффициент преобразования напряжения в частоту управляемого генератора в радианах на вольт в секунду; Kd - коэффициент преобразования фазосравнивающего устройства в вольтах на радиан; ,f{t) -импульсная характеристика •фильтра нижних частот. Синусоидальная зависимость от <Ро в уравнении (9-47) появляется потому, что в большинстве практических схем фазосравнивающих устройств выходное напряжение пропорционально или синусу, или косинусу фазовой ошибки [см. уравнение (7-45)]. Даже для простого фильтра нижних частот, имеющего один полюс, уравнение (9-47) приводит к-нелинейному дифференциальному уравнению второго порядка, которое не имеет точного решения. Полоса синхронизации Дсос соответствует максимальной величине производной dffoldt, при которой возможно решение уравнения (9-47) для установившегося режима. Полагая коэффициент передачи фильтра нижних частот по постоянному току равным единице, можно показать, что A(i>c=KoKdKu (9-48) т. е. полоса синхронизации численно равна полному коэффициенту передачи в контуре системы. Так как полоса захвата Дсоз соответствует работе системы в переходном режиме, ее определить значительно труднее, чем полосу синхронизации. Однако приближенное параметрическое выражение для полосы захвата можно записать в следующем виде [27]: Дшз = KoKdK. 1F (/Ашз) , (9-49) где /(/Асйз)-амплитудная характеристика фильтра нижних частот при Сй=ДЮз. Можно показать, что так как в любой момент времени I(/Люз) i 1, полоса захвата всегда меньше полосы синхронизации. Если в качестве фильтра нижних частот используется простое инерционное звено (см. рис. 9-18,а), то в этом случае уравнение для полосы захвата приближенно можно записать в следующем виде: (9-50) где Tl - постоянная времени фильтра нижних частот. Из уравнений (9-48) и (9-49) видно, что коэффициент передачи F{s) Рис. 9-17. Линеаризованная модель схемы ФАП Б виде системы с отрицательной обратной связью. усилителя постоянного тока обеспечивает независимое регулирование усиления в контуре и полосы синхронизации. Аналогично при заданной величине усиления в контуре ФАП полоса захвата определяется выбранной характеристикой /(/ю) фильтра нижних частот. Когда контур ФАП находится в режиме синхронизации, нелинейный переходный процесс захвата к этому времени уже полностью закончен. Следовательно, в режиме синхронизации контур ФАП приближенно можно представить в виде линейной системы управления рис. 9-17 и анализировать, применяя метод преобразования Лапласа. В этом случае в качестве переменной, как правило, используют полную фазовую ошибку в контуре, обозначая через фв и фо относительные фазы входного сигнала и выходного напряжения управляемого генератора соответственно. Так как управляемый генератор осуществляет преобразование напряжения в частоту колебаний, а фаза является интегралом частоты, генератор выполняет функцию интегратора в контуре обратной связи. В линейной .модели на рис. 9-17 предполагается, что общий фазовый сдвиг (фо-фв) достаточно мал, и поэтому можно считать sin (фо-фв) ~ фо-Ф. (9-51) Из рис. 9-17 следует, что передаточная функция контура ФАП при разомкнутой цепи обратной связи запишется как = (9.52) где Kn=KoKdKi - полный коэффициент передачи в контуре; F (s) - передаточная функция фильтра нижних частот. Используя методы анализа линейных схем с обратной связью, передаточную характеристику замкнутой системы H{s) можно связать с передаточной функцией разомкнутой схемы а корни характеристического полинома легко определить методом корневого годографа. На рис. 9-18 показаны корневые годографы линеаризованной модели схемы ФАП рис. 9-17 в зависимости от усиления Ки в контуре для случаев использования в качестве фильтра инерционного (а) и корректирующего (б) звена. В каждом из этих случаев, полюс разомкнутой системы в начале координат обусловлен интегрирующим действием управляемого генератора. Из анализа характеристик корневого годографа рис. 9-18,а следуют выводы: 1. По мере возрастания полного коэффициента передачи в контуре -1-0 -jo, 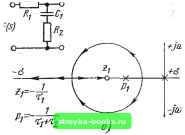 Рис. 9-18. Корневые годографы системы ФАП при различных схемах фильтров нижних частот. Kn при заданной величине постоянной времени фильтра нижних частот Tl мнимая составляющая полюсов передаточной функции замкнутой системы возрастает; таким образом, собственная частота контура увеличивается и затухание в контуре становится все .меньше и меньше. 2. При возрастании постоянной времени фильтра Ti действительная составляющая полюсов передаточной функции замкнутой системы становится меньше я затухание в контуре уменьшается. Как и в любой реальной системе с обратной связью, чрезмерные фазовые сдвиги или недоминирующие полюсы, связанные с блоками в контуре ФАП, могут привести к изгибу годографов в сторону .правой полуплоскости, как показано пунктирными линиями на рис. 9-18,а. Это происходит в случае, когда постоянная времени фильтра или коэффициент передачи в контуре становятся очень большими, и может привести к появлению в контуре незатухающих колебаний. Проблема устойчивости может быть решена путем применения корректирующего фильтра, показанного на рис. 9-18,6. При правильном выборе сопротивления R2 такой фильтр ограничивает корневой годограф в пределах левой полуплоскости и обеспечивает устойчивость. Однако корректирующий фильтр также снижает подавление помех в системе, так как высокочастотные составляющие ошибки в контуре при этом ослабляются в меньшей степени. Когда контур ФАП находится в режиме синхронизации, изменение частоты на входе преобразуется в изменение уровня напряжения на управляющем входе генераторе. На рис. 9-19 представлены типовые передаточные характеристики частота- напряжение .контура фазовой а-втоподстройки. Предполагается, что на вход системы подается синусоидальный сигнал, частота которого медленно меняется в пределах всего частотного диа,пазона, а по 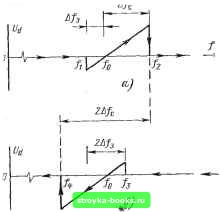 f • Рис. 9-19. Передаточные характеристики контура ФАП при медленном возрастании (а) и при уменьшении частоты входного сигнала (б). вертикальной оси откладывается соответствующее напряжение сигнала рассогласования. На верхнем рисунке показано, что при постепенном возрастании частоты входного сигнала контур ФАП не реагирует на изменение частоты до тех пор, пока она не достигнет /1, соответствующей началу полосы захвата 2Д/з. В этот момент контур переходит скачком в режим синхронизации с входным сигналом и возникает отрицательный скачок напряжения рассогласования. При дальнейшем увеличении частоты входного сигнала управляющее напряжение изменяется со скоростью, обратно пропорциональной коэффициенту передачи генератора 1Жо и проходит через нуль при частоте сигнала /з=/о- Контур отслеживает частоту входного сигнала, пока она не достигнет значения fa, соответствующего верхней границе полосы синхронизации. При этом контур ФАП выходит из режима синхронизации, напряжение сигнала рассогласования уменьшается до нуля, а частота управляемого генератора становится равной частоте свободных колебаний. Если частота входного сигнала будет медленно иЗМе-няться в обратном направлении, то цикл работы повторится согласно [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [ 64 ] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] 0.001 |