
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] имеет \1Ножество решений [ц, = 1,2,...,т (см. рис.4.1) и в задачи измерительного устройства входит выбор истинной точки t*j, (точка t на рис. 4.1) из множества точек 4л основе статистического анализа совокупности выборочных данных {ы, = ы(1Д„)}, принятых за время наблюдения. Этот выбор также может сопровождаться ошибками (например, выбор t[ вместо t-fj, которые принято называть аномальными ошибками, в отличие от «нормальных» ошибок, ословленных небольшими флюктуа-циями точки отсчетй1 в окрестности истинного значения к.И. При небольшой интенсивности помех количество точе к!и удовлетворяющих уравнению (4.1) на интервале измерения хтах, невелико, и устранение аномальных ошибок 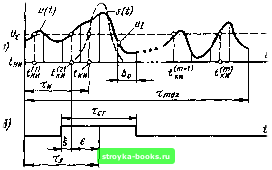 Рис. 4.1. Смесь сигнала н помех на входе системы может осуществляться программным путем. Для этого вычислительное устройство должно производить статистический анализ выборочных данных {«,} в окрестности всех «подозрительных» точек по нескольким реализациям u(t) (н.и<<<н.и+Ттаж). в качестве истинного значения *к.и выбирается такое значение /VI,» ко- * К.И торое имеет наименьшую меру разброса на принятом ансамбле реализаций. По мэре возрастания интенсивности помех увеличивается количество „подозрительных* точек tj\, а следовательно, и объем вычислительных затрат, необходимых для выполнения статистического анализа, связанного с устранением аномальных ошибок. Например, если Хтах=2 мс (что соответствует дальности до цели 300 км) и вероятность превышения шумом порогового уровня равняется 0,05 при интервале корреляции шумовых выбросов 1 мкс, то среднее количество «подозрительных» точек на интервале Хтах будет равным 100. Это значит, что в 100 раз возрастает объем массива входных данных, который необходим для программного осуществления всех операций, связанных с селекцией полезного сигнала в процессе измерения. Соответственно в 100 раз возрастают требуемый объем ОЗУ и продолжительность вычислений. Если такое увеличение вычислительных затрат оказывается неприемлемым, то необходимо использовать аппаратурные средства для осуществления предварительной селекции сигнала при высокой интенсивности помех, с тем чтобы программная часть обработки входных данных ограничивалась статистическим анализом одной-двух «подозрительных» точек. В случае полной неопределенности относительно временного положения сигнала на заданном априорном интервале Хтах указанная селекция основывается на известных принципах поиска и обнаружения сигнала. При этом весь диапазон измерений Ттах разбивается на ряд элементарных интервалов (дискретов) длительностью Ао. В каждом дискрете осуществляется статистический анализ принимаемых данных, и на. основании определенного критерия принимается решение о наличии или отсутствии полезного сигнала. Если в некотором дискрете с номером ко произошло обнаружение сигнала, то это значит, что соответствующее этому дискрету значение временного интервала тосАо можно принять в качестве грубой оценки измеряемого интервала, и в дальнейшем задача измерения ограничивается уточнением истинного значения *к.и на интервале длительностью Aq. Таким образом, операция измерения Ти выполняется в два этапа. На первом этапе, выполняемом аппаратно, происходит грубое определение величины ти с ошибкой, не превышающей До. Это грубое значение определяет первоначальную установку строба, в пределах которого осуществляется второй этап измерения - уточнение Ти, выполняемый программно. Если длительность строба выбрана так, что вероятность попадания в строб более чем одной «подозрительной»- чгочки tUl пренебрежимо мала, то в этом случае с помощью, аппаратных средств полностью исключаются дополнительные вычислительные затраты, связанные с устранением аномальных ошибок. Поскольку временное положение принимаемых сигналов обычно меняется в процессе измерений, устройство, осуществляющее операцию стробирования сигнала,, должно обеспечивать возможность перемещения строба Сигнал Дискриминатор Схема (рормирования cmpoSoB Хронизатор rieuna 1 ~-ня Схема задержки I I I 14.-=.™: Аппаратная часть \гкя Обнаружитель I I I \МП8У Рис. 4.2. Структура следящего измерителя на базе МПК В соответствии с перемещением полезного сигнала. Для этой цели в РТС широко используются следящие системы. Общая структура таких систем с учетом специфики микропроцессорной обработки сигналов представлена на рис. 4.2. Штриховыми линиями обозначены возможные взаимосвязи аппаратной части с микропроцессорным вычислительным устройством (МПВУ), открывающие дополнительные возможности управления различными узлами следящего измерителя, работающего в составе микропроцессорной системы. Процедура селекции сигнала в рассматриваемой системе выполняется следующим образом. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [ 36 ] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0009 |