
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Димыми аппаратными операциями являются преобразование измеряемого временного интервала ti в цифровой код и обратное преобразование результата вычислений из цифровой формы во временной интервал, определяющий задержку строба относительно зондирующего импульса, поскольку предполагается, что операция стробирования сигнала осуществляется аппаратно. Кроме того, в первоначальном варианте можно принять, что исходное значение то для алгоритма (5.1) также определяется аппаратными средствами, т. е. в состав изме- 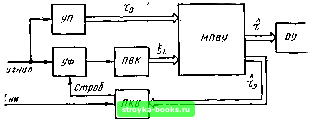 Рис. 5.3. Структура следящего радиодальномера на базе МПК рителя входит устройство поиска (например, многоканальный бинарный накопитель, рассмотренный в §4.2), осуществляющее предварительную селекцию полезного сигнала и ввод значения то в вычислительное устройство. Следует заметить, что все указанные аппаратные операции - преобразования время - код и код - время, поиск и обнаружение сигнала, в принципе, могут быть выполнены и программным путем. Однако при обработке сигналов малой длительности программная реализация этих операций влечет за собой повышение требований к быстродействию МПК и снижение эффективности его использования. Структурная схема измерителя, использующего выбранный состав аппаратных средств, приведена на рис. 5.3, где приняты следующие обозначения блоков: МПВУ - микропроцессорное вычислительное устройство, ПВК - преобразователь время - код, ПКВ - преобразователь код -время, УП - устройство поиска, ОУ- оконечное устройство (потребитель результатов измерения), УФ - устройство фиксации, предназначенное для определения точки окончания измеряемого интер-156 вала в пределах строба, задаваемого с помощью управляемого преобразователя код - время. Взаимодействие отдельных блоков с вычислительным устройством поясняется временными диаграммами на рис. 5.4. Устройство поиска определяет начальное значение То измеряемого временнбго интервала между импульсом начала отсчета (/н.и на рис. 5.4,а) и приходящим сигнальным импульсом (рис. 5.4,6). По окончании процедуры поиска (рис. 5.4,б) осуществляется ввод а) t„ g) Сигнал iji. Поиск \ Поиск г) Ввод to д) Расчет bd) Щ ,
Рис. 5.4. Временные диаграммы к принципу работы радиодальномера значения то в вычислительное устройство (рис. 5.4,г), затем расчет тэ(0 по заданной программе рис. 5А,д и вывод полученных значений тэ(г) (рис. 5.4,е) на блок преобразования код - время, который вырабатывает строб длительностью Тст, задержанный относительно начального импульса на величину Тзг=Тэ(0 -Тст/2 (рис. 5А,ж). Преобразователь время -код играет роль временнбго дискриминатора. Он вырабатывает число, пропорциональное временнбму интервалу между началом строба и импульсом окончания измеряемого интервала, формируемым устройством фиксации. Напомним, что величина связана с ошибкой экстраполяции Ег соотношением ,= ег+Тст/2 и, следовательно, при изменении Бг ОТ -Тот/2 до +Тст/2 значсние меняется от О до Тст. Это упрощает операцию обмена между преоб- разователем время - код и вычислителем, так как отпа дает необходимость передачи знака числа. После окончания строба числовое значение вводится в вычислительное устройство (рис. 5.4,з) и выполняется программный расчет в соответствии с алгоритмом (5.1) - (5.3), т. е. начинается новый цикл измерения (рис. 5А,д - и). Дополнительные вычислительные операции, связанные с преобразованием оценки в форму, удобную для работы оконечного устройства, а также операция вывода т(0 из вычислительного устройства, могут осуществляться в свободный от основных операций интервал времени - между выводом тэ(0 и вводом g (рис. 5.4,ы). Приведенная на рис. 5.3 схема определяет характер аппаратных операций, выполняемых над принимаемым сигналом. Характер вычислительных операций, требуемых для реализации рассматриваемого алгоритма с помощью вычислительного устройства, описывается схемой программы, представленной на рис. 5.5. Смысл используемых здесь мнемонических обозначений операндов О) и констант у поясняется табл. 5.2. Таблица 5.2
Для полноты в схему программного алгоритма введены два управляющих программных блока (ПБ): ПБ «Поиск», вырабатывающий начальное значение То и используемый в том случае, если необходимо опера-158 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |
|||||||||||||||||||||||||||||||||||||||||||||