
|
|
|
Главная Микропроцессорные системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] Однако этот ббпрбс не преДстаЬлйет затруднения ДЛя проектировщиков РТС и поэтому здесь не рассматривается. Результаты детализации программной и аппаратной частей проектируемой системы являются основой для следующего этапа проектирования. 5.2.5. ЭТАП КОРРЕКТИРОВКИ Здесь прежде всего следует выяснить, насколько полученные на этапе детализации характеристики системы удовлетворяют разработчика и какие возможности улучшения этих характеристик имеются в разрабатываемой системе. В частности, из данных табл. 5.10 видно, что выбранный МПК не только полностью удовлетворяет всем сформулированным ранее требованиям, но и обладает существенными резервами по времени вычислений и объему памяти. В связи с этим для иллюстрации возможностей корректировки рассмотрим вариант программного исполнения процедуры поиска, который позволяет избежать дополнительных аппаратурных затрат, связанных с реализацией многоканального бинарного накопителя и схем управления, обеспечивающих переключение режимов работы преобразователя время - код (см. рис. 5.6). Ограничим рассмотрение операцией последовательного одноканального поиска, которая может быть реализована на основе представленной выше структуры аппаратной части микропроцессорной системы (см. рис. 5.6). Рассматриваемая процедура поиска заключается в дискретизации заданного априорного интервала [xmin, tmax], на ряд элсментарных интервалов (дискретов) длительностью До и поочередном анализе каждого интервала с целью выявления факта наличия в нем полезного сигнала. Ослабление, действия помех достигается при этом благодаря многократной проверке наличия сигнала в каждом дискрете на протяжении определенного количества Nn периодов повторения сигнала. Решение об обнаружении сигнала в каком-либо дискрете принимается в случае фиксации Кп сигнальных импульсов за N„ проверок. В этом случае осуществляется переход к программе измерения (см. рис. 5.5), а в противном случае - переход к анализу следующего дискрета. Аппаратная часть системы, необходимая для осуществления этой процедуры, включает в себя преобразо- ватели код -время и время -код, а также элементы сопряжения их с вычислительным устройством, сохраняющие те же принципы работы, что и в структурной схеме на рис. 5.6. Последовательный перебор анализируемых дискретов осуществляется с помощью преобразователя код - время, имеющего интервал дискретизации До= Апкв =fст= =5,33 мкс (п. 5.2.3). Управление перемещением строба выполняется программным путем. Наличие сигнала в анализируемом дискрете (задаваемом положением строба) фиксируется с помощью преобразователя время- код, так же как при обслуживании программного блока «Контроль» (см. рис. 5.7), т. е. условие ,<тст является подтверждением факта наличия сигнала. Здесь следует заметить, что в данном случае отпадает необходимость переключения параметров этого преобразователя при переходе в режим поиска, так как отсчет значения то образуется автоматически программным путем по окончании процедуры поиска. Схема программного алгоритма последовательного поиска представлена на рис. 5.9. Эта схема использует разработанный ранее программный блок «Отсчет» и ряд характерных элементов блока «Контроль» (см. рис. 5.7, табл. 5.8). Сходство указанных алгоритмов подчеркивается использованием одних и тех же операндов, за исключением операнда NSIG (вместо NABS), который обозначает число принятых импульсов сигнала (вместо числа пропаданий в блоке «Контроль»). Работа алгоритма начинается с установки минимального значения Xmin задержки строба (посредством вывода операнда EXTT=Xmin на преобразователь код - время в ПБ «Отсчет») и фиксации наличия сигнала в стробе с помощью проверки условия ERRT<z.Xct (значение операнда ERRT вырабатывается в ПБ «Отсчет»). Операнды NCON и NSIG отражают число испытаний и число принятых сигналов соответственно. Если в течение N„ испытаний не зафиксировано превышение порога обнаружения (условие NSIGKu), то производится увеличение на 1 операнда ЕХТТ, управляющего положением строба, и процедура накопления сигналов возобновляется (благодаря обнулению операндов }ICON и NSIG). Эта операция повторяется до тех пор, пока задержка строба (задаваемая операндом ЕХТТ) не достигнет конца априорного интервала (условие ЕХТТ" 190 Хтах). В ЭТОМ случзе ЦИКЛ поискз повторяется, начиная с минимального значения задержки (операция EXTT:=zXmin). Процедура поиска заканчивается при накоплении в некотором дискрете требуемого числа импульсов сигнала (условие NSIGKn) Временное положение этого дискрета определяется соответствующим значением операнда ЕХТТ, которое сохраняется в известной ячейке ОЗУ при переходе к последующей программе измерения. Это значение и является искомым начальным отсчетом То, который в данном случае определяется программным путем. Начало ) HC0N:-=0 flSIQ:=0 ПО „Отсчет \ NC0N-=NC0H*1\  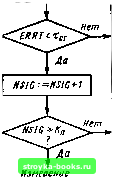 Рис. 5.9. Схема программного алгоритма последовательного поиска [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [ 62 ] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] 0.0011 |